zpk
Null-Polstellen-Verstärkungsmodell
Beschreibung
Verwenden Sie zpk, um reellwertige oder komplexwertige Null-Polstellen-Verstärkungsmodelle zu erstellen oder um dynamische Systemmodelle in die Form eines Null-Polstellen-Verstärkungsmodells zu konvertieren.
Null-Polstellen-Verstärkungsmodelle stellen Transferfunktionen in faktorisierter Form dar. Betrachten Sie in diesem Beispiel die folgende zeitkontinuierliche SISO-Transferfunktion:
G(s) kann folgendermaßen in die Null-Polstellen-Verstärkungsform faktorisiert werden:
Eine allgemeinere Darstellung des SISO-Null-Polstellen-Verstärkungsmodells:
Hier sind z und p die Vektoren der reellwertigen oder komplexwertigen Nullstellen und Polstellen und k ist die reellwertige oder komplexwertige skalare Verstärkung. Bei MIMO-Modellen wird jeder E/A-Kanal durch eine derartige Transferfunktion hij(s) dargestellt.
Sie können ein Null-Polstellen-Verstärkungsmodellobjekt entweder durch direkte Angabe von Polstellen, Nullstellen und Verstärkungsfaktoren oder durch die Konvertierung eines anderen Modelltyps (wie einem Zustandsraummodell ss) in Null-Polstellen-Verstärkungsform erstellen.
Sie können zpk auch verwenden, um verallgemeinerte Zustandsraummodelle (genss) oder unsichere Zustandsraummodelle (uss (Robust Control Toolbox)) zu erstellen.
Erstellung
Syntax
Beschreibung
Erstellen eines ZPK-Modells
sys = zpk(zeros,poles,gain)zeros und poles (als Vektoren angegeben) und dem skalaren Wert von gain. Der Ausgang sys ist ein zpk-Modellobjekt, in dem die Modelldaten gespeichert sind. Setzen Sie für Systeme oder Nullstellen oder Polstellen zeros oder poles auf []. Diese zwei Eingänge müssen nicht die selbe Länge aufweisen und das Modell muss nicht ordnungsgemäß sein (d. h. einen Polstellen-Überschuss aufweisen).
sys = zpk(___,PropertyName=Value)
Konvertieren zu einem ZPK-Modell
sys = zpk(ltiSys,Name=Value)zpk-Darstellung des schwach besetzten Modells ltiSys durch Berechnung der Nullstellen und Polstellen auf der Grundlage eines oder mehrerer angegebener Name-Wert-Argumente. Da diese Methode Nullstellen für jedes Eingangs-Ausgangs-Paar berechnet, ist sie am besten für Modelle mit kleinen Eingangs-Ausgangs-Größen geeignet. (seit R2025a)
Erstellen einer Variable für rationale Ausdrücke
s = zpk('s') erzeugt eine spezielle Variable s, die Sie in einem rationalen Ausdruck verwenden können, um ein zeitkontinuierliches Null-Polstellen-Verstärkungsmodell zu erstellen. Die Verwendung eines rationalen Ausdrucks kann manchmal einfacher und intuitiver sein als die Angabe von Polynomkoeffizienten.
Eingangsargumente
Name-Wert-Argumente
Ausgangsargumente
Eigenschaften
Objektfunktionen
Die folgenden Listen enthalten eine repräsentative Teilmenge der Funktionen, die Sie mit zpk-Modellen verwenden können. Im Allgemeinen ist jede Funktion, die auf Dynamische Systemmodelle anwendbar ist, auch auf ein zpk-Objekt anwendbar.
Beispiele
Betrachten Sie in diesem Beispiel das folgende zeitkontinuierliche SISO-Null-Polstellen-Verstärkungsmodell:
Geben Sie die Nullstellen, Polstellen und Verstärkung an und erstellen Sie das SISO-Null-Polstellen-Verstärkungsmodell.
zeros = 0; poles = [1-1i 1+1i 2]; gain = -2; sys = zpk(zeros,poles,gain)
sys =
-2 s
--------------------
(s-2) (s^2 - 2s + 2)
Continuous-time zero/pole/gain model.
Model Properties
Betrachten Sie in diesem Beispiel das folgende zeitdiskrete SISO-Null-Polstellen-Verstärkungsmodell mit 0,1 s Abtastzeit:
Geben Sie die Nullstellen, Polstellen, Verstärkungsfaktoren und die Abtastzeit an und erstellen Sie das zeitdiskrete SISO-Null-Polstellen-Verstärkungsmodell.
zeros = [1 2 3]; poles = [6 5 4]; gain = 7; ts = 0.1; sys = zpk(zeros,poles,gain,ts)
sys = 7 (z-1) (z-2) (z-3) ------------------- (z-6) (z-5) (z-4) Sample time: 0.1 seconds Discrete-time zero/pole/gain model. Model Properties
In diesem Beispiel erstellen Sie ein MIMO-Null-Polstellen-Verstärkungsmodell durch Verknüpfung von SISO-Null-Polstellen-Verstärkungsmodellen. Betrachten Sie das folgende zeitkontinuierliche Null-Polstellen-Verstärkungsmodell mit einem Eingang und zwei Ausgängen:
Geben Sie das MIMO-Null-Polstellen-Verstärkungsmodell an, indem Sie die SISO-Einträge verknüpfen.
zeros1 = 1; poles1 = -1; gain = 1; sys1 = zpk(zeros1,poles1,gain)
sys1 = (s-1) ----- (s+1) Continuous-time zero/pole/gain model. Model Properties
zeros2 = -2; poles2 = [-2+1i -2-1i]; sys2 = zpk(zeros2,poles2,gain)
sys2 =
(s+2)
--------------
(s^2 + 4s + 5)
Continuous-time zero/pole/gain model.
Model Properties
sys = [sys1;sys2]
sys =
From input to output...
(s-1)
1: -----
(s+1)
(s+2)
2: --------------
(s^2 + 4s + 5)
Continuous-time zero/pole/gain model.
Model Properties
Erstellen Sie ein Null-Polstellen-Verstärkungsmodell für das folgende zeitdiskrete Modell mit mehreren Ein- und Ausgängen:
mit einer Abtastzeit von ts = 0.2 Sekunden.
Geben Sie die Nullstellen und Polstellen als Zellenarrays und die Verstärkungsfaktoren als Array an.
zeros = {[] 0;2 []};
poles = {-0.3 -0.3;-0.3 -0.3};
gain = [1 1;-1 3];
ts = 0.2;Erstellen Sie das zeitdiskrete MIMO-Null-Polstellen-Verstärkungsmodell.
sys = zpk(zeros,poles,gain,ts)
sys =
From input 1 to output...
1
1: -------
(z+0.3)
- (z-2)
2: -------
(z+0.3)
From input 2 to output...
z
1: -------
(z+0.3)
3
2: -------
(z+0.3)
Sample time: 0.2 seconds
Discrete-time zero/pole/gain model.
Model Properties
Geben Sie die Nullstellen, Polstellen und Verstärkung sowie die Abtastzeit an und erstellen Sie das Null-Polstellen-Verstärkungsmodell, wobei Sie die Zustands- und Eingangsnamen mithilfe von Namen-Wert-Paaren angeben.
zeros = 4; poles = [-1+2i -1-2i]; gain = 3; ts = 0.05; sys = zpk(zeros,poles,gain,ts,'InputName','Force')
sys =
From input "Force" to output:
3 (z-4)
--------------
(z^2 + 2z + 5)
Sample time: 0.05 seconds
Discrete-time zero/pole/gain model.
Model Properties
Die Anzahl der Eingangsnamen muss der Anzahl Nullstellen entsprechen.
Die Eingänge und Ausgänge zu benennen, kann nützlich sein, wenn Sie mit den Antwortdiagrammen für MIMO-Systeme arbeiten.
step(sys)

Beachten Sie den Eingangsnamen Force im Titel des Schrittantwort-Diagramms.
In diesem Beispiel erstellen Sie ein zeitkontinuierliches Null-Polstellen-Verstärkungsmodell unter Verwendung rationaler Ausdrücke. Die Verwendung eines rationalen Ausdrucks kann manchmal einfacher und intuitiver sein als die Angabe von Polstellen und Nullstellen.
Betrachten Sie das folgende System:
Um das Transferfunktionsmodell zu erstellen, geben Sie zunächst s als zpk-Objekt an.
s = zpk('s')s = s Continuous-time zero/pole/gain model. Model Properties
Erstellen Sie das Null-Polstellen-Verstärkungsmodell unter Verwendung von s im rationalen Ausdruck.
sys = s/(s^2 + 2*s + 10)
sys =
s
---------------
(s^2 + 2s + 10)
Continuous-time zero/pole/gain model.
Model Properties
In diesem Beispiel erstellen Sie ein zeitdiskretes Null-Polstellen-Verstärkungsmodell unter Verwendung eines rationalen Ausdrucks. Die Verwendung eines rationalen Ausdrucks kann manchmal einfacher und intuitiver sein als die Angabe von Polstellen und Nullstellen.
Betrachten Sie das folgende System:
Um das Null-Polstellen-Verstärkungsmodell zu erstellen, geben Sie zunächst z als zpk-Objekt und die Abtastzeit ts an.
ts = 0.1;
z = zpk('z',ts)z = z Sample time: 0.1 seconds Discrete-time zero/pole/gain model. Model Properties
Erstellen Sie das Null-Polstellen-Verstärkungsmodell unter Verwendung von z im rationalen Ausdruck.
sys = (z - 1) / (z^2 - 1.85*z + 0.9)
sys =
(z-1)
-------------------
(z^2 - 1.85z + 0.9)
Sample time: 0.1 seconds
Discrete-time zero/pole/gain model.
Model Properties
Für dieses Beispiel erstellen Sie ein Null-Polstellen-Verstärkungsmodell mit Eigenschaften, die von einem anderen Null-Polstellen-Verstärkungsmodell geerbt wurden. Betrachten Sie die folgenden beiden Null-Polstellen-Verstärkungsmodelle:
In diesem Beispiel erstellen Sie sys1, wobei die Eigenschaften TimeUnit und InputDelay auf 'minutes' eingestellt sind.
zero1 = 0; pole1 = [0;-8]; gain1 = 2; sys1 = zpk(zero1,pole1,gain1,'TimeUnit','minutes','InputUnit','minutes')
sys1 =
2 s
-------
s (s+8)
Continuous-time zero/pole/gain model.
Model Properties
propValues1 = [sys1.TimeUnit,sys1.InputUnit]
propValues1 = 1×2 cell
{'minutes'} {'minutes'}
Erstellen Sie das zweite Null-Polstellen-Verstärkungsmodell mit den von sys1 geerbten Eigenschaften.
zero = 1; pole = [-3,5]; gain2 = 0.8; sys2 = zpk(zero,pole,gain2,sys1)
sys2 = 0.8 (s-1) ----------- (s+3) (s-5) Continuous-time zero/pole/gain model. Model Properties
propValues2 = [sys2.TimeUnit,sys2.InputUnit]
propValues2 = 1×2 cell
{'minutes'} {'minutes'}
Beachten Sie, dass das Null-Polstellen-Verstärkungsmodell sys2 dieselben Eigenschaften wie sys1 aufweist.
Betrachten Sie die folgende statische Verstärkungsmatrix m mit zwei Eingängen und zwei Ausgängen:
Legen Sie die Verstärkungsmatrix fest und erstellen Sie das Null-Polstellen-Verstärkungsmodell mit statischem Verstärkungsfaktor.
m = [2,4;...
3,5];
sys1 = zpk(m)sys1 = From input 1 to output... 1: 2 2: 3 From input 2 to output... 1: 4 2: 5 Static gain. Model Properties
Sie können das oben erhaltene Null-Polstellen-Verstärkungsmodell mit statischem Verstärkungsfaktor sys1 verwenden, um es mit einem anderen Null-Polstellen-Verstärkungsmodell zu kaskadieren.
sys2 = zpk(0,[-1 7],1)
sys2 =
s
-----------
(s+1) (s-7)
Continuous-time zero/pole/gain model.
Model Properties
sys = series(sys1,sys2)
sys =
From input 1 to output...
2 s
1: -----------
(s+1) (s-7)
3 s
2: -----------
(s+1) (s-7)
From input 2 to output...
4 s
1: -----------
(s+1) (s-7)
5 s
2: -----------
(s+1) (s-7)
Continuous-time zero/pole/gain model.
Model Properties
Berechnen Sie in diesem Beispiel das Null-Polstellen-Verstärkungsmodell des folgenden Zustandsraummodells:
Erstellen Sie das Zustandsraummodell unter Verwendung der Zustandsraummatrizen.
A = [-2 -1;1 -2]; B = [1 1;2 -1]; C = [1 0]; D = [0 1]; ltiSys = ss(A,B,C,D);
Konvertieren Sie das Zustandsraummodell ltiSys in ein Null-Polstellen-Verstärkungsmodell.
sys = zpk(ltiSys)
sys =
From input 1 to output:
s
--------------
(s^2 + 4s + 5)
From input 2 to output:
(s^2 + 5s + 8)
--------------
(s^2 + 4s + 5)
Continuous-time zero/pole/gain model.
Model Properties
Sie können eine for-Schleife verwenden, um ein Array von Null-Polstellen-Verstärkungsmodellen anzugeben.
Legen Sie zunächst das Array des Null-Polstellen-Verstärkungsmodells mit Nullstellen an.
sys = zpk(zeros(1,1,3));
Die ersten beiden Indizes stehen für die Anzahl der Ausgänge und Eingänge der Modelle, während der dritte Index die Anzahl der Modelle im Array angibt.
Erstellen Sie das Array für das Null-Polstellen-Verstärkungsmodell mithilfe eines rationalen Ausdrucks in der for-Schleife.
s = zpk('s'); for k = 1:3 sys(:,:,k) = k/(s^2+s+k); end sys
sys(:,:,1,1) =
1
-------------
(s^2 + s + 1)
sys(:,:,2,1) =
2
-------------
(s^2 + s + 2)
sys(:,:,3,1) =
3
-------------
(s^2 + s + 3)
3x1 array of continuous-time zero/pole/gain models.
Model Properties
In diesem Beispiel extrahieren Sie die gemessenen Komponenten und die Rauschkomponenten eines identifizierten Polynommodells in zwei separate Null-Polstellen-Verstärkungsmodelle.
Laden Sie das Box-Jenkins-Polynommodell ltiSys in identifiedModel.mat.
load('identifiedModel.mat','ltiSys');
ltiSys ist ein identifiziertes zeitdiskretes Modell der Form: , wobei die gemessene Komponente und die Rauschkomponente darstellt.
Extrahieren Sie die gemessenen Komponenten und die Rauschkomponenten als Null-Polstellen-Verstärkungsmodelle.
sysMeas = zpk(ltiSys,'measured') sysMeas =
From input "u1" to output "y1":
-0.14256 z^-1 (1-1.374z^-1)
z^(-2) * -----------------------------
(1-0.8789z^-1) (1-0.6958z^-1)
Sample time: 0.04 seconds
Discrete-time zero/pole/gain model.
Model Properties
sysNoise = zpk(ltiSys,'noise')sysNoise =
From input "v@y1" to output "y1":
0.045563 (1+0.7245z^-1)
--------------------------------------------
(1-0.9658z^-1) (1 - 0.0602z^-1 + 0.2018z^-2)
Input groups:
Name Channels
Noise 1
Sample time: 0.04 seconds
Discrete-time zero/pole/gain model.
Model Properties
Die gemessene Komponente kann als Regelstreckenmodell dienen, während die Rauschkomponente als Störungsmodell für den Entwurf des Regelungssystems verwendet werden kann.
Erstellen Sie für dieses Beispiel unter Annahme einer Eingangsverzögerung von 0,5 Sekunden und einer Ausgangsverzögerung von 2,5 Sekunden ein SISO-Null-Polstellen-Verstärkungsmodell.
zeros = 5; poles = [7+1i 7-1i -3]; gains = 1; sys = zpk(zeros,poles,gains,'InputDelay',0.5,'OutputDelay',2.5)
sys =
(s-5)
exp(-3*s) * ----------------------
(s+3) (s^2 - 14s + 50)
Continuous-time zero/pole/gain model.
Model Properties
Zudem können Sie über den Befehl get alle Eigenschaften eines MATLAB-Objekts darstellen.
get(sys)
Z: {[5]}
P: {[3×1 double]}
K: 1
DisplayFormat: 'roots'
Variable: 's'
IODelay: 0
InputDelay: 0.5000
OutputDelay: 2.5000
InputName: {''}
InputUnit: {''}
InputGroup: [1×1 struct]
OutputName: {''}
OutputUnit: {''}
OutputGroup: [1×1 struct]
Notes: [0×1 string]
UserData: []
Name: ''
Ts: 0
TimeUnit: 'seconds'
SamplingGrid: [1×1 struct]
Weitere Informationen zur Angabe einer Zeitverzögerung für ein LTI-Modell finden Sie unter Specifying Time Delays.
In diesem Beispiel entwickeln Sie einen 2-DOF PID-Regler mit einer Ziel-Bandbreite von 0,75 rad/s für ein System, das von dem folgenden Null-Polstellen-Verstärkungsmodell dargestellt wird:
Erstellen Sie über den Befehl zpk ein Null-Polstellen-Verstärkungsmodellobjekt sys.
zeros = []; poles = [-0.25+0.2i;-0.25-0.2i]; gain = 1; sys = zpk(zeros,poles,gain)
sys =
1
---------------------
(s^2 + 0.5s + 0.1025)
Continuous-time zero/pole/gain model.
Model Properties
Verwenden Sie die Ziel-Bandbreite und pidtune, um einen 2-DOF-Regler zu generieren.
wc = 0.75;
C2 = pidtune(sys,'PID2',wc)C2 =
1
u = Kp (b*r-y) + Ki --- (r-y) + Kd*s (c*r-y)
s
with Kp = 0.512, Ki = 0.0975, Kd = 0.574, b = 0.38, c = 0
Continuous-time 2-DOF PID controller in parallel form.
Model Properties
Verwenden Sie den Typ 'PID2', um mit pidtune einen 2-DOF-Regler zu generieren, der als pid2-Objekt dargestellt wird. Die Anzeige bestätigt dieses Ergebnis. Die Anzeige zeigt zudem, dass pidtune alle Regler-Koeffizienten optimiert, darunter die Sollpunkt-Gewichte b und c, um Leistung und Robustheit zu balancieren.
Mehr über interaktive PID-Optimierung im Live-Editor finden Sie im Live-Editor-Task Tune PID Controller. Mit diesem Task können Sie einen PID-Regler interaktiv entwickeln und MATLAB Programmcode für Ihr Live-Script automatisch generieren.
Verwenden Sie für die interaktive PID-Optimierung in einer eigenständigen App PID Tuner. Ein Beispiel zur Entwicklung eines Reglers mithilfe der App finden Sie unter Entwurf von PID-Reglern für eine schnelle Referenzverfolgung.
Seit R2025a
Dieses Beispiel zeigt, wie Sie ein verkürztes Null-Polstellen-Verstärkungsmodell eines schwach besetzten Zustandsraummodells erhalten. In diesem Beispiel wird ein schwach besetztes Modell verwendet, das durch Linearisierung eines thermischen Modells der Wärmeverteilung in einem kreiszylindrischen Stab gewonnen wurde.
Laden Sie die Modelldaten.
load cylindricalRod.mat
sys = sparss(A,B,C,D,E);
w = logspace(-7,-1,20);
size(sys)Sparse state-space model with 3 outputs, 1 inputs, and 7522 states.
Analysieren Sie den Frequenzgang des Modells.
sigmaplot(sys,w)
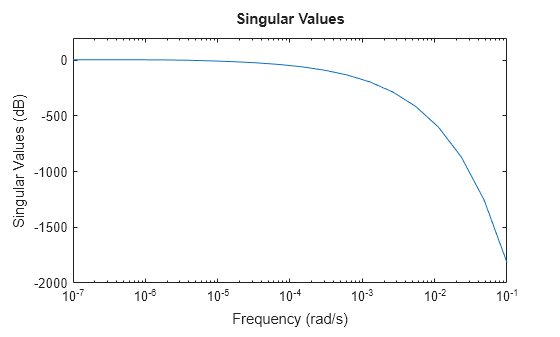
Um eine verkürzte Annäherung zu erhalten, verwenden Sie zpk und geben Sie das Frequenzband des Fokus an. Bei diesem Modell können Sie einen Frequenzbereich von 0 rad/s bis 0.01 rad/s verwenden, um die Näherung niedriger Ordnung zu erhalten.
zsys = zpk(sys,Focus=[0 1e-2],Display="off");Vergleichen Sie den Frequenzgang.
sigmaplot(sys,zsys,w)
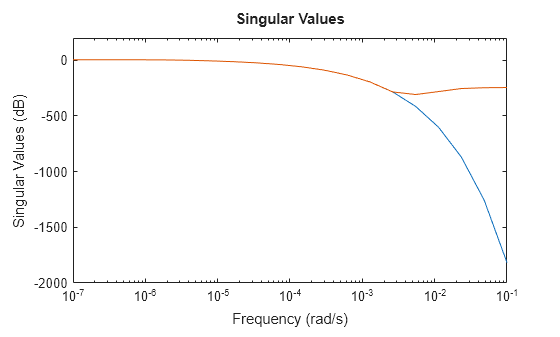
Dieses thermische Modell fällt jenseits von 0.001 rad/s sehr steil ab. Standardmäßig bietet das mit zpk erhaltene reduzierte Modell keine gute Übereinstimmung mit diesem Abfall. Um dies abzumildern, können Sie das Argument RollOff von zpk verwenden und einen minimalen Abfall-Wert jenseits des fokussierten Frequenzbandes angeben. Geben Sie für die Abfallrate einen Wert von -45 an, was einer Rate von mindestens -900 dB/Dekade entspricht.
zsys2 = zpk(sys,Focus=[0 1e-2],RollOff=-45,Display="off");
sigmaplot(sys,zsys2,w)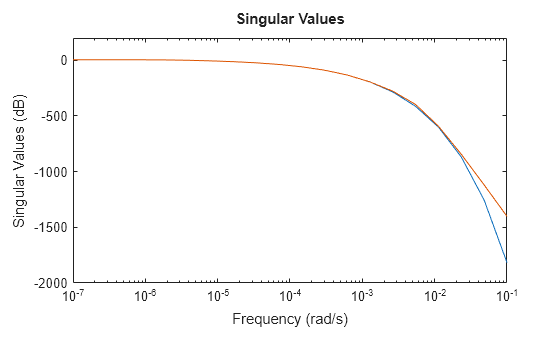
Das reduzierte Modell liefert nun eine viel bessere Annäherung an den Abfall-Wert. In diesem Beispiel führt die Anpassung der Abfallrate mit zpk jedoch dazu, dass die Nullstellen und Polstellen erneut berechnet werden müssen. Dies kann bei großen Modellen sehr rechenintensiv sein. Als Alternative können Sie die Methode der Nullpolabschneidung von reducespec verwenden und den Abfall ohne zusätzliche Berechnungskosten anpassen, nachdem die Software die Polstellen und Nullstellen berechnet hat. Ein Beispiel hierzu finden Sie unter Zero-Pole Truncation of Thermal Model.
Algorithmen
zpk verwendet die MATLAB-Funktion roots, um Transferfunktionen zu konvertieren und die Funktionen zero und pole, um Zustandsraummodelle zu konvertieren.
Zur Konvertierung schwach besetzter Modelle verwendet zpk den Krylov-Schur-Algorithmus [1] für inverse Potenziteration, um Polstellen und Nullstellen im angegebenen Frequenzband zu berechnen.
Referenzen
[1] Stewart, G. W. “A Krylov--Schur Algorithm for Large Eigenproblems.” SIAM Journal on Matrix Analysis and Applications 23, no. 3 (January 2002): 601–14. https://doi.org/10.1137/S0895479800371529.