frd
Frequenzgang-Datenmodell
Beschreibung
Verwenden Sie frd, um reellwertige oder komplexwertige Frequenzgang-Datenmodelle zu erstellen oder um dynamische Systemmodelle in die Frequenzgang-Datenmodell-Form zu konvertieren.
Frequenzgang-Datenmodelle speichern komplexe Frequenzgangdaten mit entsprechenden Frequenzpunkten. Ein Frequenzgang-Datenmodell H(jwi) speichert beispielsweise den Frequenzgang bei jeder Eingangsfrequenz wi, wobei i = 1,…,n. Das frd-Modellobjekt kann SISO- oder MIMO-Frequenzgang-Datenmodelle in kontinuierlicher oder diskreter Zeit darstellen. Weitere Informationen finden Sie unter Frequency Response Data (FRD) Models.
Sie können frd auch verwenden, um verallgemeinerte Frequenzgang-Datenmodelle (genfrd) zu erstellen.
Erstellung
frd-Modelle erhalten Sie wie folgt.
Erstellen Sie das Modell aus Frequenzgangdaten mithilfe des Befehls
frd. Beispielsweise können Sie einfrd-Modell mit bei bestimmten Frequenzen abgerufenen Frequenzgangdaten erstellen.Ein Beispiel hierzu finden Sie unter SISO-Frequenzgang-Datenmodell.
Konvertieren Sie ein lineares Modell wie ein
ss-Modell in einfrd-Modell, indem Sie den Frequenzgang des Modells bei bestimmten Frequenzen berechnen.Ein Beispiel hierzu finden Sie unter Konvertieren des Zustandsraummodells in ein Frequenzgang-Datenmodell.
Schätzen Sie das Modell mithilfe von Offline-Frequenzgang-Schätzungsworkflows. Für diese Workflows wird die Software Simulink® Control Design™ benötigt.
Weitere Informationen finden Sie unter Estimate Frequency Response at the Command Line (Simulink Control Design) und Estimate Frequency Response Using Model Linearizer (Simulink Control Design).
Syntax
Beschreibung
sys = frd(___,Name,Value)
sys = frd(ltiSys,frequency,FrequencyUnits)FrequencyUnit angegebenen Einheiten.
Eingangsargumente
Eigenschaften
Objektfunktionen
Die folgenden Listen enthalten eine repräsentative Teilmenge der Funktionen, die Sie mit frd-Modellen verwenden können. Im Allgemeinen sind viele Funktionen, die auf Dynamische Systemmodelle anwendbar sind, ebenfalls auf das frd-Objekt anwendbar. frd-Modelle funktionieren nicht mit Zeitdomänen-Analysefunktionen.
Beispiele
Erstellen Sie ein frd-Objekt aus Frequenzgangdaten.
Laden Sie für dieses Beispiel die für ein Wassertankmodell gesammelten Frequenzgangdaten.
load wtankData.matDiese Daten umfassen die Frequenzgangdaten, die für den Frequenzbereich rad/s bis rad/s erfasst wurden.
Erstellen Sie das Modell.
sys = frd(response,frequency)
sys =
Frequency(rad/s) Response
---------------- --------
0.0010 1.562e+01 - 1.9904i
0.0018 1.560e+01 - 2.0947i
0.0034 1.513e+01 - 3.3670i
0.0062 1.373e+01 - 5.4306i
0.0113 1.047e+01 - 7.5227i
0.0207 5.829e+00 - 7.6529i
0.0379 2.340e+00 - 5.6271i
0.0695 7.765e-01 - 3.4188i
0.1274 2.394e-01 - 1.9295i
0.2336 7.216e-02 - 1.0648i
0.4281 2.157e-02 - 0.5834i
0.7848 6.433e-03 - 0.3188i
1.4384 1.916e-03 - 0.1740i
2.6367 5.705e-04 - 0.0950i
4.8329 1.698e-04 - 0.0518i
8.8587 5.055e-05 - 0.0283i
16.2378 1.505e-05 - 0.0154i
29.7635 4.478e-06 - 0.0084i
54.5559 1.333e-06 - 0.0046i
100.0000 3.967e-07 - 0.0025i
Continuous-time frequency response.
Model Properties
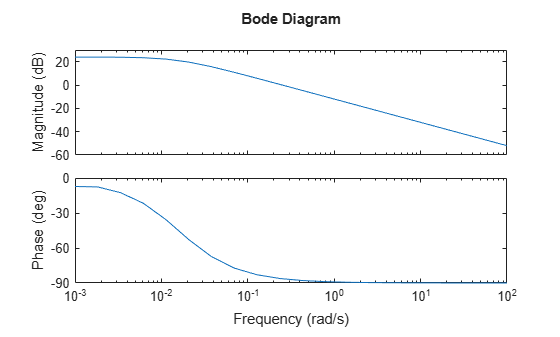
Plotten Sie sys.
bode(sys)
Betrachten Sie in diesem Beispiel die folgenden zufällig generierten Antwortdaten und -Frequenzen.
Erstellen Sie ein komplexes Array mit den Dimensionen 3-mal-2-mal-7 und einen Frequenzvektor mit sieben Punkten zwischen 0,01 und 100 rad/s. Setzen Sie die Abtastzeit Ts auf 5 Sekunden.
rng(0) r = randn(3,2,7)+1i*randn(3,2,7); w = logspace(-2,2,7); Ts = 5;
Erstellen Sie das Modell.
sys = frd(r,w,Ts)
sys =
From input 1 to:
Frequency(rad/s) output 1 output 2 output 3
---------------- -------- -------- --------
0.0100 0.5377 + 0.3192i 1.8339 + 0.3129i -2.2588 - 0.8649i
0.0464 -0.4336 + 1.0933i 0.3426 + 1.1093i 3.5784 - 0.8637i
0.2154 0.7254 - 0.0068i -0.0631 + 1.5326i 0.7147 - 0.7697i
1.0000 1.4090 - 1.0891i 1.4172 + 0.0326i 0.6715 + 0.5525i
4.6416 0.4889 - 1.4916i 1.0347 - 0.7423i 0.7269 - 1.0616i
21.5443 0.8884 - 0.1924i -1.1471 + 0.8886i -1.0689 - 0.7648i
100.0000 0.3252 - 0.1774i -0.7549 - 0.1961i 1.3703 + 1.4193i
From input 2 to:
Frequency(rad/s) output 1 output 2 output 3
---------------- -------- -------- --------
0.0100 0.8622 - 0.0301i 0.3188 - 0.1649i -1.3077 + 0.6277i
0.0464 2.7694 + 0.0774i -1.3499 - 1.2141i 3.0349 - 1.1135i
0.2154 -0.2050 + 0.3714i -0.1241 - 0.2256i 1.4897 + 1.1174i
1.0000 -1.2075 + 1.1006i 0.7172 + 1.5442i 1.6302 + 0.0859i
4.6416 -0.3034 + 2.3505i 0.2939 - 0.6156i -0.7873 + 0.7481i
21.5443 -0.8095 - 1.4023i -2.9443 - 1.4224i 1.4384 + 0.4882i
100.0000 -1.7115 + 0.2916i -0.1022 + 0.1978i -0.2414 + 1.5877i
Sample time: 5 seconds
Discrete-time frequency response.
Model Properties
Die angegebenen Daten resultieren in einem frd-Modell mit zwei Eingängen und drei Ausgängen.
Für dieses Beispiel erstellen Sie ein Frequenzgang-Datenmodell mit Eigenschaften, die von einem Transferfunktionsmodell geerbt wurden.
Erstellen Sie eine Transferfunktion sys1, deren Eigenschaft TimeUnit auf 'minutes' und deren Eigenschaft InputDelay auf 3 gesetzt ist.
numerator1 = [2,0]; denominator1 = [1,8,0]; sys1 = tf(numerator1,denominator1,'TimeUnit','minutes','InputDelay',3)
sys1 =
2 s
exp(-3*s) * ---------
s^2 + 8 s
Continuous-time transfer function.
Model Properties
propValues1 = {sys1.TimeUnit,sys1.InputDelay}propValues1=1×2 cell array
{'minutes'} {[3]}
Erstellen Sie ein frd-Modell mit von sys1 geerbten Eigenschaften.
rng(0) response = randn(1,1,7)+1i*randn(1,1,7); w = logspace(-2,2,7); sys2 = frd(response,w,sys1)
sys2 =
Frequency(rad/minute) Response
--------------------- --------
0.0100 0.5377 + 0.3426i
0.0464 1.8339 + 3.5784i
0.2154 -2.2588 + 2.7694i
1.0000 0.8622 - 1.3499i
4.6416 0.3188 + 3.0349i
21.5443 -1.3077 + 0.7254i
100.0000 -0.4336 - 0.0631i
Input delays (minutes): 3
Continuous-time frequency response.
Model Properties
propValues2 = {sys2.TimeUnit,sys2.InputDelay}propValues2=1×2 cell array
{'minutes'} {[3]}
Beachten Sie, dass das frd-Modell sys2 dieselben Eigenschaften wie sys1 aufweist.
Laden Sie für dieses Beispiel die für ein Wassertankmodell gesammelten Frequenzgangdaten.
load wtankData.matDas Modell weist einen Eingang, Spannung, und einen Ausgang, Wasserstand, auf.
Erstellen Sie ein frd-Modell und geben Sie die Namen für Eingang und Ausgang an.
sys = frd(response,frequency,'InputName','Voltage','OutputName','Height');
Plotten Sie den Frequenzgang.
bode(sys)
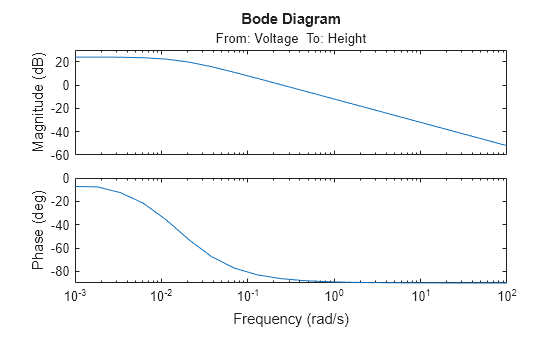
Die Namen des Eingangs und des Ausgangs werden auf dem Bode-Diagramm angezeigt. Die Eingänge und Ausgänge zu benennen, kann nützlich sein, wenn Sie mit den Antwortdiagrammen für MIMO-Systeme arbeiten.
Berechnen Sie in diesem Beispiel das frd-Modell des folgenden Zustandsraummodells:
Erstellen Sie ein Zustandsraummodell unter Verwendung der Zustandsraummatrizen.
A = [-2 -1;1 -2]; B = [1 1;2 -1]; C = [1 0]; D = [0 1]; ltiSys = ss(A,B,C,D);
Konvertieren Sie das Zustandsraummodell ltiSys in ein frd-Modell für die Frequenzen zwischen 0,01 und 100 rad/s.
w = logspace(-2,2,50); sys = frd(ltiSys,w);
Vergleichen Sie die Frequenzgänge.
bode(ltiSys,'b',sys,'r--')

Die Antworten sind identisch.
Um Array aus frd-Modellen zu erstellen, können Sie ein mehrdimensionales Array der Frequenzgangdaten angeben.
Beispiel: Wenn Sie die Antwortdaten als numerisches Array mit Größe [NY NU NF S1 ... Sn] angeben, gibt die Funktion ein S1-mal-...-mal-Sn-Array aus frd-Modellen zurück. Jedes dieser Modelle weist NY Ausgänge, NU Eingänge und NF Frequenzpunkte auf.
Erstellen Sie ein 2-mal-3-Array aus zufälligen Antwortdaten mit Modellen mit einem Ausgang und zwei Eingängen mit 10 Frequenzpunkten zwischen 0,1 und 10 rad/s.
w = logspace(-1,1,10); r = randn(1,2,10,2,3)+1i*randn(1,2,10,2,3); sys = frd(r,w);
Extrahieren Sie das Modell bei Index (2,1) aus dem Modellarray.
sys21 = sys(:,:,2,1)
sys21 =
From input 1 to:
Frequency(rad/s) output 1
---------------- --------
0.1000 0.6715 + 0.0229i
0.1668 0.7172 - 1.7502i
0.2783 0.4889 - 0.8314i
0.4642 0.7269 - 1.1564i
0.7743 0.2939 - 2.0026i
1.2915 0.8884 + 0.5201i
2.1544 -1.0689 - 0.0348i
3.5938 -2.9443 + 1.0187i
5.9948 0.3252 - 0.7145i
10.0000 1.3703 - 0.2248i
From input 2 to:
Frequency(rad/s) output 1
---------------- --------
0.1000 -1.2075 - 0.2620i
0.1668 1.6302 - 0.2857i
0.2783 1.0347 - 0.9792i
0.4642 -0.3034 - 0.5336i
0.7743 -0.7873 + 0.9642i
1.2915 -1.1471 - 0.0200i
2.1544 -0.8095 - 0.7982i
3.5938 1.4384 - 0.1332i
5.9948 -0.7549 + 1.3514i
10.0000 -1.7115 - 0.5890i
Continuous-time frequency response.
Model Properties
Sie können negative Frequenzwerte in einem frd-Objekt angeben. Diese Funktion ist nützlich, wenn Sie die Frequenzgangdaten von Modellen mit komplexen Koeffizienten erfassen möchten.
Erstellen Sie einen Frequenzvektor mit positiven und negativen Werten.
w0 = sort([-logspace(-2,2,50) 0 logspace(-2,2,50)]);
Erstellen Sie ein Zustandsraummodell mit komplexen Koeffizienten.
A = [-3.50,-1.25-0.25i;2,0]; B = [1;0]; C = [-0.75-0.5i,0.625-0.125i]; D = 0.5; Gc = ss(A,B,C,D);
Konvertieren Sie das Modell in ein frd-Modell mit den angegebenen Frequenzen.
sys = frd(Gc,w0);
Plotten Sie den Frequenzgang der Modelle.
bode(Gc,'b',sys,'r--')
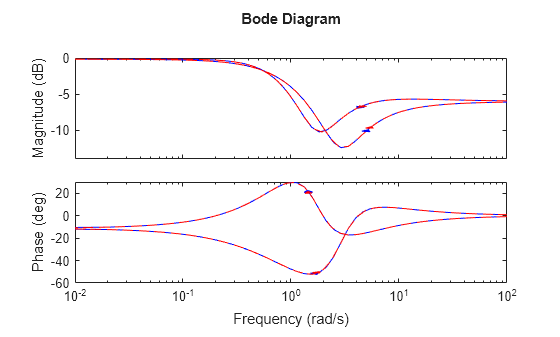
Die Diagrammantworten ähneln sich stark. Das Diagramm umfasst bei Modellen mit komplexen Koeffizienten zwei Zweige, einen für positive Frequenzen mit Pfeil nach rechts und einen für negative Frequenzen mit Pfeil nach links. Bei beiden Zweigen weisen die Pfeile auf die Richtung zunehmender Frequenzen hin.
Versionsverlauf
Eingeführt vor R2006a