PID Tuner
Optimieren von PID-Reglern
Beschreibung
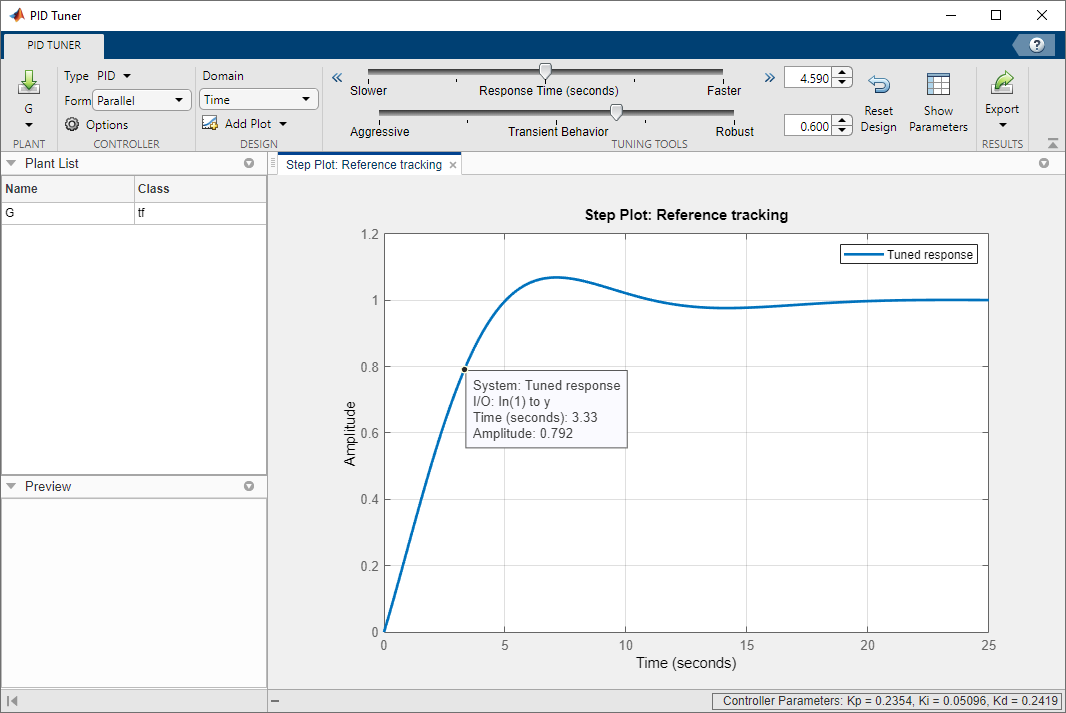
Die PID Tuner-App optimiert die Verstärkungsfaktoren eines PID-Reglers einer SISO-Regelstrecke automatisch, um ein gutes Gleichgewicht zwischen Leistung und Robustheit zu erzielen. Sie können den Reglertyp wie PI, PID mit Ableitungsfilter oder PID-Regler mit zwei Freiheitsgraden festlegen. Mithilfe von Analysediagrammen können Sie die Reglerleistung in den Zeit- und Frequenzdomänen untersuchen. Sie können die Leistung des Reglers interaktiv justieren, um die Schleifen-Bandbreite und den Phasenrand anzupassen oder die Sollwertverfolgung oder Störgrößenkompensation zu priorisieren.
Sie können PID Tuner mit einer Regelstrecke verwenden, die durch ein numerisches LTI-Modell wie eine Transferfunktion (tf) oder ein Zustandsraummodell (ss) dargestellt wird. Wenn Sie über die Simulink® Control Design™-Software verfügen, können Sie mit PID Tuner Blöcke vom Typ PID Controller oder PID Controller (2DOF) in einem Simulink-Modell optimieren. Wenn Sie über die System Identification Toolbox™-Software verfügen, können Sie mit der App eine Regelstrecke auf Basis gemessener oder simulierter Daten schätzen und einen Regler für die geschätzte Regelstrecke entwerfen.
Interaktive Optimierung im Live-Editor
Mehr über interaktive PID-Optimierung im Live-Editor finden Sie im Live-Editor-Task Tune PID Controller. Mit diesem Task können Sie einen PID-Regler interaktiv entwickeln und MATLAB®-Code für Ihr Live-Script automatisch generieren.
Öffnen Sie die PID Tuner-App
MATLAB Toolstrip: Klicken Sie auf der Registerkarte Apps unter Control System Design and Analysis auf das App-Symbol.
MATLAB-Eingabeaufforderung: Geben Sie
pidTunerein.Simulink-Modell: Klicken Sie im Dialogfeld des Blocks PID Controller oder PID Controller (2DOF) auf Tune.
Beispiele
Parameter
Im Menü Plant wird der Name der aktuellen Regelstrecke angezeigt, die der PID Tuner für den Reglerentwurf verwendet.
Verändern Sie die aktuelle Regelstrecke anhand der folgenden Menüoptionen:
Eine Liste der LTI-Modelle im PID Tuner-Datenbrowser.
Import– Importiert ein neues LTI-Modell aus dem MATLAB Workspace.Re-Linearize Closed Loop– Linearisiert die Regelstrecke zu einem anderen Snapshot-Zeitpunkt. Siehe Tune at Different Operating Point (Simulink Control Design). Diese Option ist nur bei der Optimierung eines Blocks vom Typ PID Controller oder PID Controller (2DOF) in einem Simulink-Modell verfügbar.Identify New Plant– Verwendet Systemidentifikation, um eine Regelstrecke aus gemessenen oder simulierten Antwortdaten zu erstellen (benötigt die System Identification Toolbox-Software). Siehe:Regelstreckenparameter interaktiv anhand von Antwortdaten schätzen zur Optimierung eines PID-Reglers für ein LTI-Modell.
Interactively Estimate Plant from Measured or Simulated Response Data (Simulink Control Design) zur Optimierung eines PID Controller-Blocks in einem Simulink-Modell.
Wenn Sie einen PID-Regler für eine von einem LTI-Modell dargestellte Regelstrecke optimieren, ist die Standard-Regelstrecke:
Plant= 1, wenn Sie PID Tuner über die Registerkarte Apps in der MATLAB-Werkzeugleiste geöffnet oder den BefehlpidTunerohne Eingangsargument verwendet haben.Die von Ihnen als Eingangsargument für
pidTunerfestgelegte Regelstrecke.
Wenn Sie einen Block vom Typ PID Controller oder PID Controller (2DOF) in einem Simulink-Modell optimieren, wird die Standard-Regelstrecke zu dem von den Anfangsbedingungen des Modells festgelegten Betriebszeitpunkt linearisiert. Siehe What Plant Does PID Tuner See? (Simulink Control Design)
Der Reglertyp legt fest, welche Ausdrücke im PID-Regler vorliegen. Ein PI-Regler weist beispielsweise eine proportionalen und einen integralen Ausdruck auf. Ein PDF-Regler weist einen proportionalen und einen gefilterten abgeleiteten Ausdruck auf.
Wenn Sie einen Regler für eine von einem LTI-Modell dargestellte Regelstrecke optimieren, verwenden Sie das Menü Type, um den Reglertyp festzulegen. Wenn Sie den Reglertyp ändern, entwirft PID Tuner automatisch einen neuen Regler. Die verfügbaren Reglertypen umfassen auch 2-DOF-PID-Regler für höhere Flexibilität bei dem Gleichgewicht zwischen Störgrößenkompensation und Referenzverfolgung. Weitere Informationen zu den verfügbaren Reglertypen finden Sie unter PID Controller Types for Tuning.
Wenn Sie einen Block vom Typ PID Controller oder PID Controller (2DOF) in einem Simulink-Modell optimieren, wird im Feld Type der im Block-Dialogfeld festgelegte Reglertyp angezeigt.
In diesem Feld wird die Reglerform angezeigt.
Wenn Sie einen Regler für eine von einem LTI-Modell dargestellte Regelstrecke optimieren, verwenden Sie das Menü Form, um die Reglerform festzulegen. Weitere Informationen zu Parallel- und Standard-Formen finden Sie auf den Referenzseiten zu
pidundpidstd.Wenn Sie einen Block vom Typ PID Controller oder PID Controller (2DOF) in einem Simulink-Modell optimieren, wird im Feld Form die im Block-Dialogfeld festgelegte Reglerform angezeigt.
Im Menü Domain können Sie die Domäne umschalten, in der der PID Tuner die Ziel-Leistungsparameter anzeigt.
Time– Schieberegler legen Response Time und Transient Behavior fest.Frequency– Schieberegler legen Bandwidth und Phase Margin fest.
Um den Reglerentwurf anzupassen, können Sie die Ziel-Leistungsparameter mithilfe der Schieberegler oder entsprechenden numerischen Werten anpassen.

Weitere Informationen finden Sie unter
Den Entwurf verfeinern (Optimieren eines Reglers für ein LTI-Modell)
Refine the Design (Simulink Control Design) (Optimieren eines Blocks vom Typ PID Controller oder PID Controller (2DOF) im Simulink-Modell)
Erstellen Sie Zeitdomänen- und Frequenzdomänen-Analysediagramme, um die Leistung des PID-Reglers zu analysieren. Weitere Informationen zu den verfügbaren Antwortdiagrammen finden Sie unter:
Entwurf in PID Tuner analysieren (Optimieren eines Reglers für ein LTI-Modell)
Analyze Design in PID Tuner (Simulink Control Design) (Optimieren eines Blocks vom Typ PID Controller oder PID Controller (2DOF) im Simulink-Modell)
Programmatische Nutzung
Tipps
Verwenden Sie zur PID-Optimierung über die Befehlszeile
pidtune. Mit dem Befehlpidtunekönnen Sie einen Regler für mehrere Regelstrecken zugleich entwickeln.Mehr über interaktive PID-Optimierung im Live-Editor finden Sie im Live-Editor-Task Tune PID Controller. Mit diesem Task können Sie einen PID-Regler interaktiv entwickeln und MATLAB-Code für Ihr Live-Script automatisch generieren.
Versionsverlauf
Eingeführt in R2010b