lqr
Entwurf eines linear-quadratischen Reglers (LQR)
Beschreibung
[ berechnet die optimale Verstärkungsmatrix K,S,P] = lqr(sys,Q,R,N)K, die Lösung S der zugehörigen algebraischen Riccati-Gleichung und die Polstellen P des geschlossenen Regelkreises für das zeitkontinuierliche oder zeitdiskrete Zustandsraummodell sys. Q und R sind die Gewichtsmatrizen für Zustände bzw. Eingaben. Die Kreuzterm-Matrix N wird auf Null gesetzt, wenn sie weggelassen wird.
[ berechnet die optimale Verstärkungsmatrix K,S,P] = lqr(A,B,Q,R,N)K, die Lösung S der zugehörigen algebraischen Riccati-Gleichung und die Polstellen P des geschlossenen Regelkreises unter Verwendung der zeitkontinuierlichen Zustandsraummatrizen A und B. Diese Syntax ist nur für zeitkontinuierliche Modelle gültig. Verwenden Sie dlqr für zeitdiskrete Modelle.
Beispiele
pendulumModelCart.mat enthält das Zustandsraummodell eines inversen Pendels auf einem Wagen, wobei die Ausgänge die Wagenverschiebung x und der Pendelwinkel sind. Der Steuereingang u ist die horizontale Kraft auf den Wagen.
Laden Sie zunächst das Zustandsraummodell sys in den Workspace.
load('pendulumCartModel.mat','sys')
Da die Ausgaben x und sind und es nur eine Eingabe gibt, verwenden Sie die Bryson-Regel, um Q und R zu bestimmen.
Q = [1,0,0,0;... 0,0,0,0;... 0,0,1,0;... 0,0,0,0]; R = 1;
Ermitteln Sie die Verstärkungsmatrix K mit lqr. Da N nicht angegeben ist, setzt lqr N auf 0.
[K,S,P] = lqr(sys,Q,R)
K = 1×4
-1.0000 -1.7559 16.9145 3.2274
S = 4×4
1.5346 1.2127 -3.2274 -0.6851
1.2127 1.5321 -4.5626 -0.9640
-3.2274 -4.5626 26.5487 5.2079
-0.6851 -0.9640 5.2079 1.0311
P = 4×1 complex
-0.8684 + 0.8523i
-0.8684 - 0.8523i
-5.4941 + 0.4564i
-5.4941 - 0.4564i
Die Bryson-Regel liefert zwar normalerweise zufriedenstellende Ergebnisse, sie ist jedoch oft nur der Ausgangspunkt eines iterativen Trial-and-Error-Entwurfsverfahrens, mit dem Sie die Reaktion Ihres geschlossenen Systems auf der Grundlage der Entwurfsanforderungen abstimmen.
aircraftPitchModel.mat enthält die Zustandsraum-Matrizen eines Luftfahrzeugs, wobei der Eingang der Höhenruder-Ausschlagswinkel und der Ausgang der Neigungswinkel des Luftfahrzeugs ist.
Berücksichtigen Sie bei einer Sprungreferenz von 0,2 Radiant die folgenden Entwurfskriterien:
Anstiegszeit weniger als 2 Sekunden
Einschwingzeit weniger als 10 Sekunden
Fehler im stationären Zustand weniger als 2%
Laden Sie die Modelldaten in den Workspace.
load('aircraftPitchModel.mat')Definieren Sie die gewichtete Zustandskosten-Matrix Q und die gewichtete Kontrollmatrix R. Im Allgemeinen können Sie die Bryson-Regel verwenden, um Ihre anfänglichen gewichteten Matrizen Q und R zu definieren. Für dieses Beispiel betrachten Sie den Ausgangsvektor C zusammen mit einem Skalierungsfaktor von 2 für die Matrix Q und setzen Sie R gleich 1. R ist ein Skalar, da das System nur einen Eingang hat.
R = 1
R = 1
Q1 = 2*C'*C
Q1 = 3×3
0 0 0
0 0 0
0 0 2
Berechnen Sie mit lqr die Verstärkungsmatrix.
[K1,S1,P1] = lqr(A,B,Q1,R);
Prüfen Sie die Sprungantwort des geschlossenen Regelkreises mit der erzeugten Verstärkungsmatrix K1.
sys1 = ss(A-B*K1,B,C,D); step(sys1)
Da diese Antwort nicht den Entwurfszielen entspricht, erhöhen Sie den Skalierungsfaktor auf 25, berechnen Sie die Verstärkungsmatrix K2 und überprüfen Sie die Sprungantwort des geschlossenen Regelkreises für die Verstärkungsmatrix K2.
Q2 = 25*C'*C
Q2 = 3×3
0 0 0
0 0 0
0 0 25
[K2,S2,P2] = lqr(A,B,Q2,R); sys2 = ss(A-B*K2,B,C,D); step(sys2)
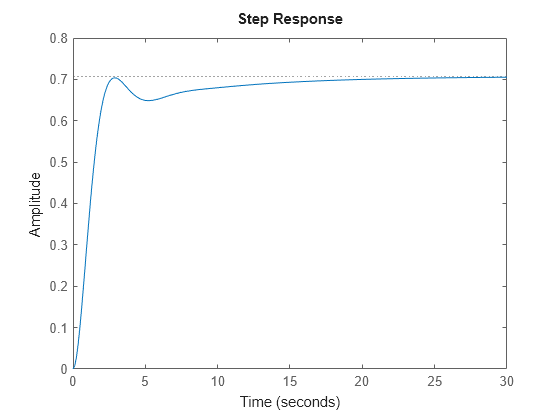

Im Diagramm der Sprungantwort des geschlossenen Regelkreises erfüllen die Anstiegszeit, die Einschwingzeit und der stationäre Fehler jetzt die Entwurfsziele.
Eingabeargumente
Ausgangsargumente
Beschränkungen
Die Eingangsdaten müssen die folgenden Bedingungen erfüllen:
Das Paar (A,B) muss stabilisierbar sein.
R muss positiv definit sein.
muss positiv semi-definit (Äquivalent zu ) sein.
darf keinen unbeobachtbaren Modus auf der imaginären Achse (oder Einheitskreis in diskreter Zeit) haben.
Tipps
lqrunterstützt Deskriptor-Modelle mit nichtsinguläremE. Der AusgangSvonlqrist die Lösung der algebraischen Riccati-Gleichung für das äquivalente explizite Zustandsraummodell:
Algorithmen
Für zeitkontinuierliche Systeme berechnet lqr die Zustands-Feedback-Steuerung , die die quadratische Kostenfunktion
abhängig von der Systemdynamik minimiert.
Zusätzlich zur Zustands-Feedback-Verstärkung K liefert lqr die Lösung S der zugehörigen algebraischen Riccati-Gleichung
und die Polstellen des geschlossenen Regelkreises . Die Verstärkungsmatrix K wird aus S abgeleitet mit
Für zeitdiskrete Systeme berechnet lqr die Zustands-Feedback-Steuerung , die
abhängig von der Systemdynamik minimiert.
In allen Fällen, in denen Sie die Kreuzterm-Matrix N weglassen, setzt lqr N auf 0.
Versionsverlauf
Eingeführt vor R2006a