Entwurf von PID-Reglern für eine schnelle Referenzverfolgung
In diesem Beispiel wird gezeigt, wie PID Tuner zum Entwerfen eines Reglers für die folgende Regelstrecke verwendet wird.
Die Entwurfsanforderung für das geschlossene Regelungssystem besteht darin, einen Referenzeingang mit einer Anstiegszeit von weniger als 1,5 Sekunden und einer Einschwingzeit von weniger als 6 Sekunden zu verfolgen.
In diesem Beispiel stellen Sie die Regelstrecke als LTI-Modell dar. Informationen zur Verwendung von PID Tuner zum Optimieren eines PID Controller-Blocks in einem Simulink®-Modell finden Sie unter Tune PID Controller to Favor Reference Tracking or Disturbance Rejection (Simulink Control Design).
Erstellen Sie das Regelstreckenmodell und öffnen Sie PID Tuner, um einen PI-Regler für den ersten Durchlauf eines Entwurfs zu entwerfen.
sys = zpk([],[-1 -1 -1],1); pidTuner(sys,'pi')
Wenn Sie PID Tuner öffnen, wird automatisch ein Regler des von Ihnen angegebenen Typs (hier: PI) entworfen. Das Ziel beim Entwurf des Reglers ist ein Ausgleich zwischen Leistung (Antwortzeit) und Robustheit (Stabilitätsreserven). PID Tuner zeigt die Sprungantwort des geschlossenen Regelungssystems mit dem entworfenen Regler an.
Tipp
Sie können PID Tuner auch im MATLAB®-Desktop auf der Registerkarte Apps öffnen. In diesem Fall verwenden Sie das Menü Plant in PID Tuner, um Ihr Regelstreckenmodell anzugeben.
Untersuchen Sie die Anstiegszeit und die Einschwingzeit der Referenzverfolgung.
Klicken Sie mit der rechten Maustaste auf das Diagramm und wählen Sie
Characteristics > Rise Timeaus, um die Anstiegszeit als blauen Punkt im Diagramm zu markieren. Wählen SieCharacteristics > Settling Timeaus, um die Einschwingzeit zu markieren. Wenn Sie auf einen der blauen Punkte klicken, wird ein Tooltipp mit numerischen Werten angezeigt.
Der erste Entwurf ergibt einen PI-Regler mit einer Anstiegszeit von 2,35 Sekunden und einer Einschwingzeit von 10,7 Sekunden. Beide Ergebnisse sind langsamer als in den Entwurfsanforderungen vorgesehen.
Hinweis
Wenn die Leistungsmetriken nicht in Tooltipps im Diagramm, sondern in einer Tabelle angezeigt werden sollen, klicken Sie auf Show parameters. Mit dieser Aktion wird eine Anzeige mit Leistungs- und Robustheitsmetriken und den optimierten Reglerverstärkungen geöffnet.
Schieben Sie den Schieberegler Response time nach rechts, um zu versuchen, die Schleifenleistung zu verbessern. Das Antwortdiagramm wird automatisch mit dem neuen Entwurf aktualisiert.

Wenn Sie den Schieberegler Response time so weit verschieben, dass die Anforderung an eine Anstiegszeit von weniger als 1,5 Sekunden erfüllt ist, werden die Schwingungen stärker. Außerdem ist in der Anzeige der Parameter zu sehen, dass die Einschwingzeit der neuen Antwort viel zu lang ist.

Um eine schnellere Antwort zu erreichen, muss der Algorithmus Stabilität einbüßen.
Ändern Sie den Reglertyp, um die Antwort zu verbessern.
Wenn Sie dem Regler ein Differenzialverhalten hinzufügen, erhält PID Tuner mehr Freiheit, um einen angemessenen Phasenrand mit der gewünschten Antwortgeschwindigkeit zu erreichen.
Wählen Sie im Menü Type die Option
PIDFaus. PID Tuner entwirft einen neuen PIDF-Regler. (Weitere Informationen zu den verfügbaren Reglertypen finden Sie unter PID-Reglertyp.)
Jetzt erfüllen die Anstiegszeit und die Einschwingzeit die Entwurfsanforderungen. Sie können den Schieberegler Response time verwenden, um weitere Anpassungen an der Antwort vorzunehmen. Um zum Standardergebnis der automatischen Optimierung zurückzukehren, klicken Sie auf Reset Design.
Hinweis
Um statt der Antwortzeit die Regelkreisbandbreite anzupassen, wählen Sie
Frequencyim Menü Domain aus. Die Bandbreite ist umgekehrt proportional zur Antwortzeit.Analysieren Sie ggf. weitere Systemantworten.
Um weitere Systemantworten zu analysieren, klicken Sie auf Add Plot. Wählen Sie die Systemantwort aus, die Sie analysieren möchten.
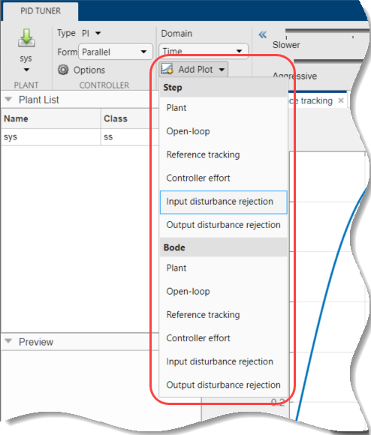
Um zum Beispiel die Sprungantwort des geschlossenen Regelungssystems auf eine Störung am Regelstreckeneingang zu beobachten, wählen Sie im Abschnitt Step des Menüs Add Plot die Option
Input disturbance rejectionaus. Die Antwort der Störgrößenkompensation wird in einem neuen Diagramm angezeigt.
Weitere Informationen zu den verfügbaren Antwortdiagrammen finden Sie unter Entwurf in PID Tuner analysieren.
Tipp
Mit den Optionen auf der Registerkarte View können Sie festlegen, wie PID Tuner mehrere Diagramme anzeigt.
Exportieren Sie Ihren Reglerentwurf in den MATLAB-Workspace.
Um Ihren fertigen Reglerentwurf in den MATLAB-Workspace zu exportieren, klicken Sie auf
 Export. PID Tuner exportiert den Regler als
Export. PID Tuner exportiert den Regler als Sie können aber auch das Kontextmenü im Data Browser verwenden, um ein Modell zu exportieren. Klicken Sie dazu auf die Registerkarte Data Browser.

Klicken Sie dann mit der rechten Maustaste auf das Modell und wählen Sie Export aus.
