c2d
Konvertieren eines Modells von kontinuierlicher zu diskreter Zeit
Beschreibung
sysd = c2d(sysc,Ts)sysc mithilfe einer Haltefunktion nullter Ordnung für die Eingänge und einer Abtastzeit von Ts.
Beispiele
Diskretisieren Sie die folgende zeitkontinuierliche Transferfunktion:
Das System weist eine Eingangsverzögerung von 0,3 s auf. Diskretisieren Sie das System mithilfe der Dreiecksnäherung (Haltefunktion erster Ordnung) mit einer Abtastzeit Ts = 0,1 s.
H = tf([1 -1],[1 4 5],'InputDelay', 0.3); Hd = c2d(H,0.1,'foh');
Vergleichen Sie die Schrittantworten der zeitkontinuierlichen und diskretisierten Systeme.
step(H,'-',Hd,'--')

Diskretisieren Sie die folgende verzögerte Transferfunktion mit einer Haltefunktion nullter Ordnung für den Eingang und einer Abtastrate von 10 Hz.
h = tf(10,[1 3 10],'IODelay',0.25);
hd = c2d(h,0.1)hd =
0.01187 z^2 + 0.06408 z + 0.009721
z^(-3) * ----------------------------------
z^2 - 1.655 z + 0.7408
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
In diesem Beispiel weist das diskretisierte Modell hd eine Verzögerung von drei Abtastzeitperioden auf. Der Diskretisierungsalgorithmus absorbiert die verbleibende Verzögerung einer halben Periode in die Koeffizienten von hd.
Vergleichen Sie die Schrittantworten der zeitkontinuierlichen und diskretisierten Modelle.
step(h,'--',hd,'-')

Seit R2024a
Erstellen Sie ein zeitkontinuierliches Zustandsraummodell mit zwei Zuständen und einer Eingangsverzögerung.
sys = ss(tf([1,2],[1,4,2])); sys.InputDelay = 2.7
sys =
A =
x1 x2
x1 -4 -2
x2 1 0
B =
u1
x1 2
x2 0
C =
x1 x2
y1 0.5 1
D =
u1
y1 0
Input delays (seconds): 2.7
Continuous-time state-space model.
Model Properties
Diskretisieren Sie das Modell mithilfe der Tustin-Diskretisierungsmethode und einem Thiran-Filter, um fraktionale Verzögerungen zu modellieren. Die Abtastzeit Ts = 1 Sekunde.
opt = c2dOptions('Method','tustin','ThiranOrder',3); sysd1 = c2d(sys,1,opt)
sysd1 =
A =
x1 x2
x1 -0.4286 -0.5714
x2 0.2857 0.7143
B =
u1
x1 0.5714
x2 0.2857
C =
x1 x2
y1 0.2857 0.7143
D =
u1
y1 0.2857
(values computed with all internal delays set to zero)
Internal delays (sampling periods): 1 1 1
Sample time: 1 seconds
Discrete-time state-space model.
Model Properties
Standardmäßig modelliert die Funktion weitere Verzögerungen als interne Verzögerungen im diskretisierten Modell. Um weitere Verzögerungen als Zustände im diskretisierten Modell zu modellieren, setzen Sie die Option DelayModeling von c2dOptions auf 'state'.
opt2 = c2dOptions('Method','tustin','ThiranOrder',3,'DelayModeling','state'); sysd2 = c2d(sys,1,opt2)
sysd2 =
A =
x1 x2 x3 x4 x5
x1 -0.4286 -0.5714 -0.00265 0.06954 2.286
x2 0.2857 0.7143 -0.001325 0.03477 1.143
x3 0 0 -0.2432 0.1449 -0.1153
x4 0 0 0.25 0 0
x5 0 0 0 0.125 0
B =
u1
x1 0.002058
x2 0.001029
x3 8
x4 0
x5 0
C =
x1 x2 x3 x4 x5
y1 0.2857 0.7143 -0.001325 0.03477 1.143
D =
u1
y1 0.001029
Sample time: 1 seconds
Discrete-time state-space model.
Model Properties
Das diskretisierte Modell enthält nun drei weitere Zustände x3, x4 und x5, was einem Thiran-Filter dritter Ordnung entspricht. Da die durch die Abtastzeit geteilte Zeitverzögerung 2,7 ist, kann der Thiran-Filter dritter Ordnung ('ThiranOrder' = 3) die gesamte Zeitverzögerung annähern.
Schätzen Sie eine zeitkontinuierliche Transferfunktion und diskretisieren Sie diese.
load iddata1 sys1c = tfest(z1,2); sys1d = c2d(sys1c,0.1,'zoh');
Schätzen Sie eine zeitdiskrete Transferfunktion zweiter Ordnung.
sys2d = tfest(z1,2,'Ts',0.1);Vergleichen Sie die Antwort des diskretisierten zeitkontinuierlichen Transferfunktionsmodells sys1d mit der Antwort des direkt geschätzten zeitdiskreten Modells sys2d.
compare(z1,sys1d,sys2d)

Die zwei Systeme sind nahezu identisch.
Diskretisieren Sie ein identifiziertes Zustandsraummodell, um einen Prädiktor, der die Antwort einen Schritt in der Zukunft vorausberechnet, zu erstellen.
Erstellen Sie ein zeitkontinuierliches, identifiziertes Zustandsraummodell mithilfe von Schätzdaten.
load iddata2
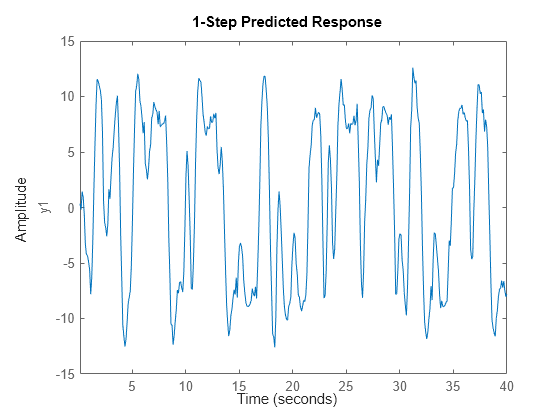
sysc = ssest(z2,4);Prognostizieren Sie die prognostizierte Antwort sysc einen Schritt in der Zukunft.
predict(sysc,z2)
Diskretisieren Sie das Modell.
sysd = c2d(sysc,0.1,'zoh');Erstellen Sie ein Prädiktormodell aus dem diskretisierten Modell sysd.
[A,B,C,D,K] = idssdata(sysd); Predictor = ss(A-K*C,[K B-K*D],C,[0 D],0.1);
Predictor ist ein Modell mit zwei Eingängen, das die gemessenen Ausgangs- und Eingangssignale ([z1.y z1.u]) verwendet, um die prognostizierte Antwort von sysc einen Schritt in der Zukunft zu berechnen.
Simulieren Sie das Prädiktormodell, um dieselbe Antwort wie der Befehl predict zu erhalten.
lsim(Predictor,[z2.y,z2.u])
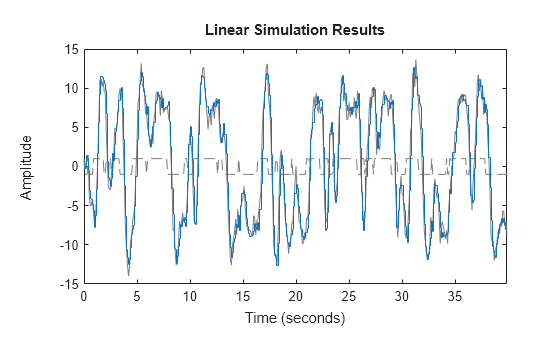
Die Simulation des Prädiktormodells gibt dieselbe Antwort wie predict(sysc,z2) aus.
Eingabeargumente
Ausgangsargumente
Versionsverlauf
Eingeführt vor R2006aSiehe auch
c2dOptions | d2c | d2d | thiran | translatecov (System Identification Toolbox) | Konvertierung der Modellrate