LPV- und LTV-Modelle
Erstellen, Bearbeiten, Analysieren und Simulieren linearer parametervarianter Modelle (LPV) und linearer zeitvarianter Modelle (LTV). Diese Modelle können nichtlineare Systeme approximieren und ermöglichen es Ihnen, lineare Entwurfstechniken effizient auf nichtlineare Modelle anzuwenden.
Mit den verfügbaren Funktionen können Sie:
LPV- oder LTV-Modellen aus mathematischen Ausdrücken erstellen
LPV- oder LTV-Modelle erstellen, die Linearisierungsergebnisse über ein Gitter von Arbeitsbedingungen interpolieren
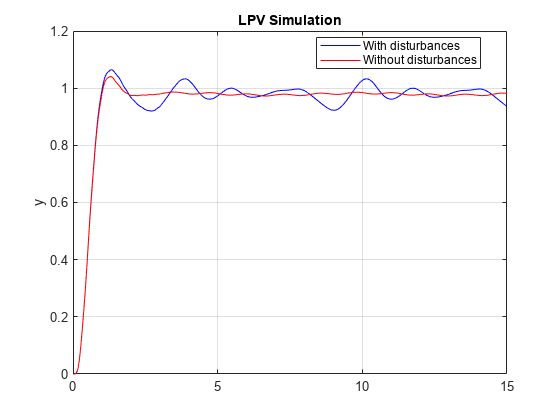
Die Zeitantwort simulieren
Signalbasierte Verbindungen zwischen variierenden Modellen und mit LTI-Modellen angeben
Die Dynamik über ein Gitter von Parametern abtasten, um lokale LTI-Approximationen zu erhalten
LPV- oder LTV-Modelle diskretisieren und neuabtasten.
Funktionen
Blöcke
Themen
Grundlagen von LTV- und LPV-Modellen
- LTV and LPV Modeling
Fundamentals of linear time-varying and parameter-varying models. - Using LTV and LPV Models in MATLAB and Simulink
Create, analyze, and simulate linear parameter-varying and linear time-varying state-space models.
Verwendung analytischer LTV- und LPV-Modelle
- LPV Model of Bouncing Ball
Construct an LPV representation of a system that exhibits multi-mode dynamics. - LPV Model of Engine Throttle
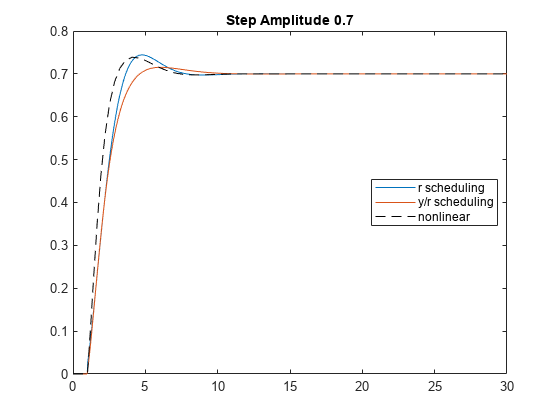
Model engine throttle behavior as a linear parameter-varying system. - Analysis of Gain-Scheduled PI Controller
Analyze gain-scheduled PI control of an LPV system. - LPV Model of Magnetic Levitation System
Create analytic LPV model from linearized equations of magnetic levitation system. - Gain-Scheduled LQG Controller
Demonstrate instability in gain-scheduled control when parameters vary too quickly.
Verwendung gerasterter LTV- und LPV-Modelle
- LPV Approximation of Boost Converter Model
Obtain linear parameter-varying approximation of a nonlinear Simscape™ Electrical™ model. - Design and Validate Gain-Scheduled Controller for Nonlinear Aircraft Pitch Dynamics
Approximate nonlinear behavior of airframe pitch axis dynamics using linear parameter-varying model. - LPV Model of Magnetic Levitation Model from Batch Linearization Results
Create a gridded LPV model from batch linearization results of a magnetic levitation model. - Reduced Order Modeling of a Nonlinear Dynamical System as an Identified Linear Parameter Varying Model (System Identification Toolbox)
Identify a linear parameter varying reduced order model of a cascade of nonlinear mass-spring-damper systems.
Enthaltene Beispiele
Control Design for Spinning Disks
Design a gain-scheduled H2 controller for a coupled-spinning disks model.
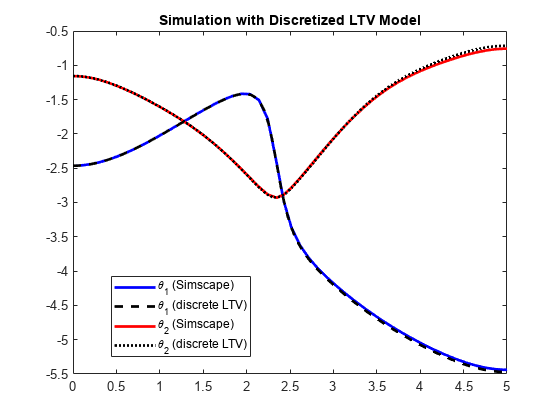
LTV Model of Two-Link Robot
Obtain a linear time-varying state-space model of a two-link robot along a trajectory.
Hidden Couplings in Gain-Scheduled Control
Demonstrate hidden couplings in gain-scheduled control.
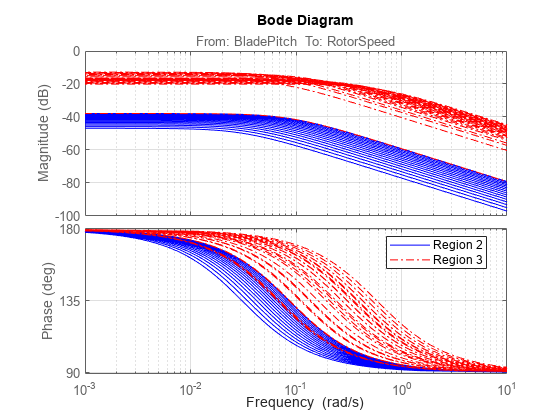
Control Design for Wind Turbine
Design a gain-scheduled controller for a linear parameter-varying model of wind turbine.
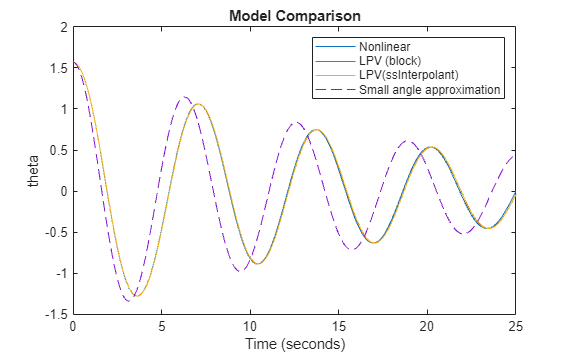
Create LPV Pendulum Model Using Batch Linearization
Create LPV model of Pendulum Using batch linearization results.