LPV System
Simulation von linearen parametervarianten Systemen (LPV-Systemen)
Bibliotheken:
Control System Toolbox /
Linear Parameter Varying
Beschreibung
Ein lineares parametervariantes (LPV) System ist ein lineares Zustandsraummodell, dessen Dynamik in Abhängigkeit bestimmter zeitlich variabler Parameter, der sogenannten Planungsparameter, variiert. In MATLAB® wird ein LPV-Modell in Form eines Zustandsraums mit Koeffizienten dargestellt, die von den Parametern abhängig sind.
Mathematisch können Sie ein LPV-System folgendermaßen darstellen.
Dabei gilt:
u(t) sind die Eingänge
y(t) sind die Ausgänge
x(t) sind die Modellzustände mit Anfangswert xinit
ist der Vektor der Zustandsableitung für zeitkontinuierliche Systeme und der Vektor der Zustandsaktualisierung x[k+1] für zeitdiskrete Systeme. Hier ist k der Integer-Index, der die Anzahl Abtastperioden Ts zählt.
A(p), B(p), C(p) und D(p) sind die Zustandsraum-Matrizen, die durch den Planungsparameter-Vektor p festgelegt sind.
Die Parameter p = p(t) sind messbare Funktionen der Eingänge und der Zustände des Modells. Sie können eine skalare Größe oder ein Vektor aus mehreren Parametern sein. Die Menge der Planungsparameter definiert den Planungsraum, auf dem das LPV-Modell definiert ist.
dx0(p), x0(p), u0(p) und y0(p) sind die Offets der Werte von , x(t), u(t) und y(t) bei einem bestimmten Parameterwert p = p(t) oder p[k].
Sie können die Offsets erhalten, indem Sie zusätzliche Linearisierungsinformationen zurückliefern, wenn Sie Funktionen wie
linearize(Simulink Control Design) odergetIOTransfer(Simulink Control Design) aufrufen. Ein Beispiel hierzu finden Sie unter LPV Approximation of Boost Converter Model (Simulink Control Design).
Vorsicht
Vermeiden Sie es, C(p) und D(p) von den Systemausgängen y abhängig zu machen. Andernfalls führt die resultierende Zustandsraumgleichung y = C(y)x + D(y)u zu einer algebraischen Schleife, da die Berechnung des Ausgangswerts y die Kenntnis des Ausgangswerts voraussetzt. Diese algebraische Schleife neigt zu Instabilität und Divergenz. Versuchen Sie stattdessen, C und D in Form der Zeit t, der Blockeingänge u und der Zustandsausgänge x auszudrücken.
Aus ähnlichen Gründen gilt es zu vermeiden, A(p) und B(p) auf der Grundlage des dx-Ausgangs zu planen. Beachten Sie, dass A und B ohne Weiteres von y abhängen dürfen, wenn y eine feste Kombination von Zuständen und Eingängen ist (mit anderen Worten, wenn y = Cx + Du, wobei C und D konstante Matrizen sind).
Der Block implementiert eine gitterbasierte Darstellung des LPV-Systems. Der Nutzer wählt ein Wertegitter für die Planungsparameter. Für jeden Wert p = p* geben Sie das entsprechende lineare System als ein Zustandsraum-Modellobjekt (ss oder idss (System Identification Toolbox)) an. Sie verwenden das generierte Array von Zustandsraummodellen, um den Block LPV System zu konfigurieren.
Der Block akzeptiert ein Array von Zustandsraummodellen mit Betriebspunktinformationen. Der Block extrahiert Informationen über die Planungsvariablen aus der Eigenschaft SamplingGrid des LTI-Arrays. Die Planungsvariablen definieren das Gitter der LPV-Modelle. Sie sind skalarwertige Größen, die Funktionen der Zeit, Eingänge und Zustände oder Konstanten sein können. Sie werden verwendet, um die lokale Dynamik im Betriebsbereich zu bestimmen. Die Software interpoliert die Werte dieser Variablen. Der Block verwendet dieses Array mit Dateninterpolations- und Extrapolationstechniken für die Simulation.
Beispiele
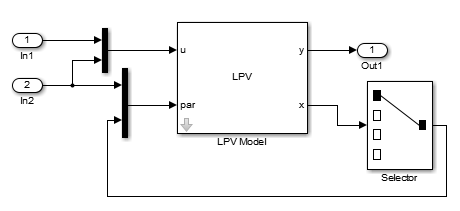
Betrachten Sie ein LPV-Modell mit 2 Eingängen, 3 Ausgängen und 4 Zuständen. Verwenden Sie den Eingang u(2) und den Zustand x(1) als Planungsparameter. Konfigurieren Sie das Simulink®-Modell wie in der folgenden Abbildung gezeigt.
Betrachten Sie ein lineares Masse-Feder-Dämpfer-System, dessen Masse sich in Abhängigkeit von einer externen Laststeuerung ändert. Die maßgebliche Gleichung lautet:
Wobei die von der externen Steuerung abhängige Masse, das Dämpfungsverhältnis, die Steifigkeit der Feder und die Antriebskraft ist. ist die Position der Masse zu einem bestimmten Zeitpunkt . Für einen festen Wert von ist das System linear und lässt sich wie folgt ausdrücken
,
Dabei gilt: ist der Zustandsvektor und der Wert der Masse für einen bestimmten Wert von .
In diesem Beispiel geht es darum, das Verhalten des Modells über einen Bereich von Eingangswerten von 1 bis 10 Volt zu untersuchen. Messen Sie für jeden Wert von die Masse und berechnen Sie die lineare Darstellung des Systems. Nehmen Sie an, die Masse ist mit dem Eingang durch die folgende Beziehung verbunden: . Für Werte von u im Bereich von 1 bis 10 ergibt sich das folgende Array linearer Systeme.
c = 5; k = 300; u = 1:10; m = 10*u + 0.1*u.^2; for i = 1:length(u) A = [0 1; -k/m(i), -c/m(i)]; B = [0; 1/m(i)]; C = [1 0]; sys(:,:,i) = ss(A,B,C,0); end
Die Variable ist der Planungseingang. Fügen Sie diese Information dem Modell hinzu.
sys.SamplingGrid = struct('LoadCommand',u);Konfigurieren des LPV-System-Blocks:
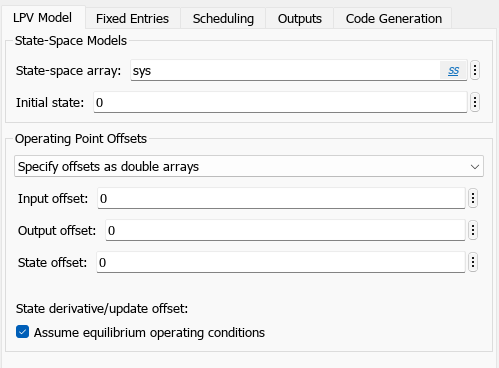
Geben Sie
sysin das Feld Zustandsraum-Array ein.Verbinden Sie den Eingangs-Port
parmit einem eindimensionalen Quellsignal, das die Werte der Laststeuerung erzeugt. Wenn die Quelle Werte zwischen 1 und 10 liefert, verwendet der Block Interpolation zur Berechnung des linearen Modells zu einem bestimmten Zeitpunkt.. Andernfalls verwendet der Block Extrapolation.
Simulieren Sie das LPV-Modell mit einem konstanten Krafteingang von 100 N und zufälligen Werten für die Lastbefehl-Planungsvariable.
model = "simMSDLPV";
open_system(model);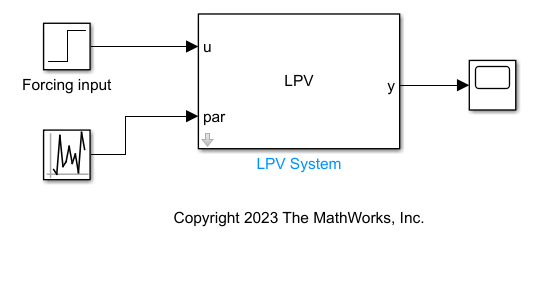

Dieses Beispiel demonstriert, wie Sie ein lineares parametervariantes Modell (LPV) einer Motordrehzahl mit dem LPV System-Block simulieren können. Der LPV System-Block interpoliert ein Zustandsraum-Array, um die LPV-Antwort zu modellieren. Üblicherweise erstellen Sie ein derartiges Array, indem Sie ein nicht lineares Modell über einen Bereich von Betriebsbedingungen hinweg im Batch linearisieren. Dieses Beispiel umfasst ein linearisiertes Ergebnis des Motordrehzahlmodells in scdspeedlpvData. Weitere Informationen zur Linearisierung dieses Modells finden Sie unter Linearize Engine Speed Model (Simulink Control Design).
Öffnen Sie das Modell.
model = "scdspeedLPVCompare";
open_system(model);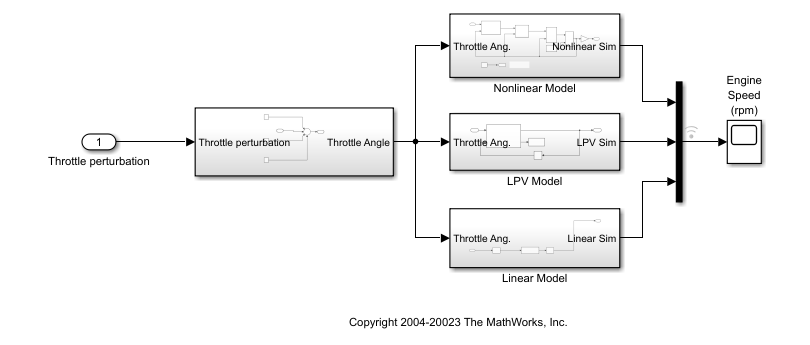
Laden Sie das Linearisierungsergebnis zur Implementierung des LPV-Modells.
load scdspeedlpvData.matDas LPV-Modell wird im LPV Modell-Subsystem implementiert.
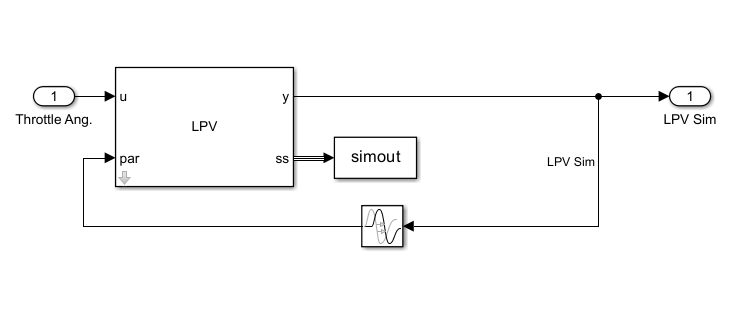
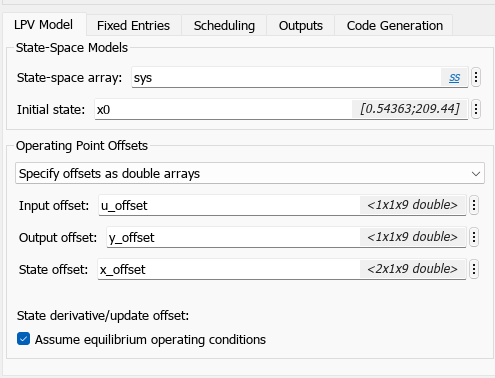
Der LPV System-Block verwendet die Drosselklappenstellung als Eingang und den Drehzahlausgang als Planungsvariable. Die Blockparameter werden wie in der Abbildung dargestellt konfiguriert. Hier erhalten Sie das Zustandsraum-Array sys und den Offset, indem Sie das nicht lineare Modelle im Batch linerarisieren.
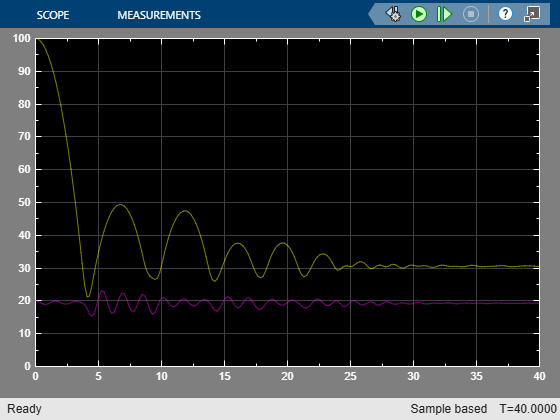
Simulieren Sie das Modell und plotten Sie den Antwortvergleich.
sim(model);
plot(logsOut{1}.Values.Time,logsOut{1}.Values.Data)
grid on
legend("Nonlinear sim","LPV sim","LTI sim",Location="best")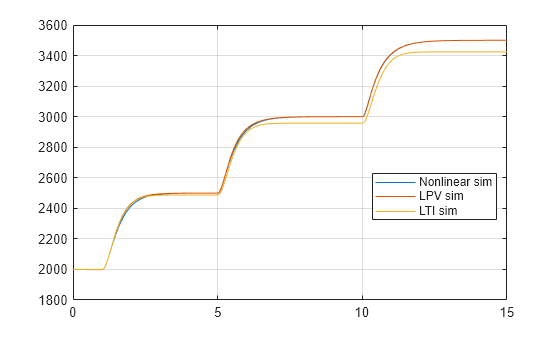
Das LPV-Modell stellt eine gute Annäherung der nicht linearen Antwort dar.
Erweiterte Beispiele

LPV Approximation of Boost Converter Model
Approximate a nonlinear Simscape™ Electrical™ model using a linear parameter varying model.
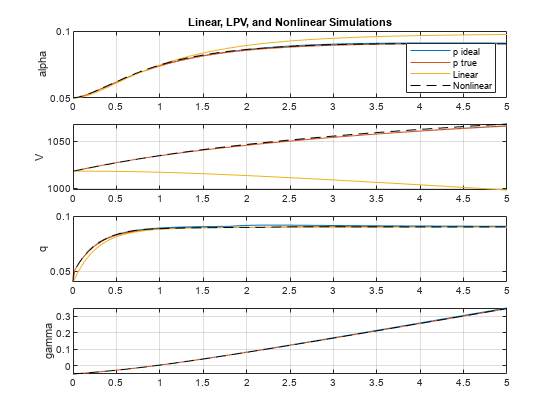
Design and Validate Gain-Scheduled Controller for Nonlinear Aircraft Pitch Dynamics
Approximate nonlinear behavior of airframe pitch axis dynamics using linear parameter-varying model.
Using LTI Arrays for Simulating Multi-Mode Dynamics
Construct a Linear Parameter Varying (LPV) representation of a system that exhibits multi-mode dynamics.

Approximate Nonlinear Behavior Using Array of LTI Systems
You can use linear parameter varying models to approximate the dynamics of nonlinear systems.
Beschränkungen
Interne Verzögerungen können nicht so extrapoliert werden, dass sie kleiner sind als ihr Minimalwert im Zustandsraum-Modellarray.
Wenn Sie ein Streuraster von linearen Modellen verwenden, um das LPV-System zu definieren, wird nur das Schema der Nächster-Nachbar-Interpolation verwendet. Dies kann die Genauigkeit der Simulationsergebnisse verringern. Es wird empfohlen, mit rechteckigen Rastern, die mit
ndgriderstellt wurden, zu arbeiten.