lpvss
Description
Use lpvss to represent linear state-space models whose dynamics
vary as a function of time-dependent parameters. Linear parameter-varying
(LPV) models are helpful to obtain low-complexity, locally linear approximations of nonlinear
systems. They can model a much richer class of behaviors than LTI models, especially when the
parameters are allowed to depend on internal states (quasi-LPV). Hence, using
lpvss models lets you efficiently apply design techniques, such as
gain-scheduled control, to nonlinear models.
You can use lpvss to create continuous-time or discrete-time linear
parameter-varying state-space models. In continuous time, an lpvss model is
described by the following state-space equations.
Here, p is a vector of time-dependent exogenous parameters and δ0(t,p), x0(t,p), u0(t,p), and y0(t,p) are varying derivative, state, input, and output offsets, respectively.
In discrete time, an lpvss model is described by the following
state-space equations.
Here, the integer index k counts the number of sampling periods
Ts.
You can use an lpvss object to model:
Linear systems whose coefficients depend on external or environmental parameters. For an example, see Control Design for Spinning Disks.
Nonlinear systems operating near steady-state conditions that change in time and depend on a few physical parameters. For example, see Design and Validate Gain-Scheduled Controller for Nonlinear Aircraft Pitch Dynamics.
Use lpvss to construct LPV models whose dynamics are described by a
MATLAB® function (the data function). Use ssInterpolant to
construct LPV models that interpolate linearized LTI dynamics over a grid of operating
conditions. The lpvss object cannot represent quasi-LPV models consisting of
an LPV model with a scheduling map p(t) =
h(t,x,u), but
you can specify the parameter trajectory as a function of time t, states
x, and inputs u to simulate quasi-LPV models. See
LPV and LTV Models for functions and
operations applicable to lpvss objects.
Creation
Syntax
Description
lpvSys = lpvss(ParamNames,DataFcn)ParamNames specifies a name for
each element of the parameter vector p. DataFcn is
the name or a handle to the data function, the user-defined
MATLAB function that calculates the matrices and offsets for given
(t,p) values (or
(k,p) values in discrete time).
lpvSys = lpvss(ParamNames,DataFcn,ts)ts.
lpvSys = lpvss(ParamNames,DataFcn,ts,tcheck,pcheck)DataFcn at
(tcheck,pcheck) to determine the number of states,
inputs, and outputs. By default, lpvss uses
(tcheck,pcheck) = (0,0).
lpvSys = lpvss(___,PropertyName=Value)
Input Arguments
Properties
Object Functions
Examples
Create a continuous-time SISO linear-parameter varying model.
For this example, dataFcnMaglev.m defines the matrices and offsets of a magnetic levitation system. The magnetic levitation controls the height of a levitating ball using a coil current that creates a magnetic force on the ball.
These matrices and offsets are defined in the dataFcnMaglev.m data function provided with this example.
Create an LPV model.
lpvsys = lpvss('p',@dataFcnMaglev)Continuous-time state-space LPV model with 1 outputs, 1 inputs, 2 states, and 1 parameters. Model Properties
View the data function.
type dataFcnMaglev.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = dataFcnMaglev(~,p) % MAGLEV example: % x = [h ; dh/dt] % p=hbar (equilibrium height) mb = 0.02; % kg g = 9.81; alpha = 2.4832e-5; A = [0 1;2*g/p 0]; B = [0 ; -2*sqrt(g*alpha/mb)/p]; C = [1 0]; % h D = 0; E = []; dx0 = []; x0 = [p;0]; u0 = sqrt(mb*g/alpha)*p; % ibar y0 = p; % y = h = hbar + (h-hbar) Delays = [];
Create a discrete-time linear-parameter varying model.
The matrices and offsets are given by:
, , ,
.
These matrices and offsets are defined in the lpvFcnDiscrete.m data function provided with this example.
Specify the properties and create the LPV model.
Ts = 0.01;
ParamNames = 'p';
DataFcn = @lpvFcnDiscrete;
lpvSys = lpvss(ParamNames,DataFcn,Ts)Discrete-time state-space LPV model with 1 outputs, 1 inputs, 1 states, and 1 parameters. Model Properties
View the data function.
type lpvFcnDiscrete.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = lpvFcnDiscrete(k,p) A = sin(0.1*p); B = 1; C = 1; D = 0; E = []; dx0 = []; x0 = []; u0 = []; y0 = 0.1*sin(k); Delays = [];
For this example, dataFcnMaglev.m defines the matrices and offsets of a magnetic levitation system. The magnetic levitation controls the height of a levitating ball using a coil current that creates a magnetic force on the ball. This example simulates the model in open loop.
Create an LPV model.
lpvSys = lpvss('h',@dataFcnMaglev)Continuous-time state-space LPV model with 1 outputs, 1 inputs, 2 states, and 1 parameters. Model Properties
You can set additional properties using the dot notation.
lpvSys.StateName = {'h','hdot'};
lpvSys.InputName = 'current';
lpvSys.InputName = 'height';Simulate the response of this model to an arbitrary sinusoidal input current.
h0 = 1; [~,~,~,~,~,~,x0,u0,~] = dataFcnMaglev([],h0); t = 0:1e-3:1; u = u0*(1+0.1*sin(10*t)); y = lsim(lpvSys,u,t,x0,@(t,x,u) x(1));
Plot the response.
plot(t,y,t,u/u0) legend('height','current')
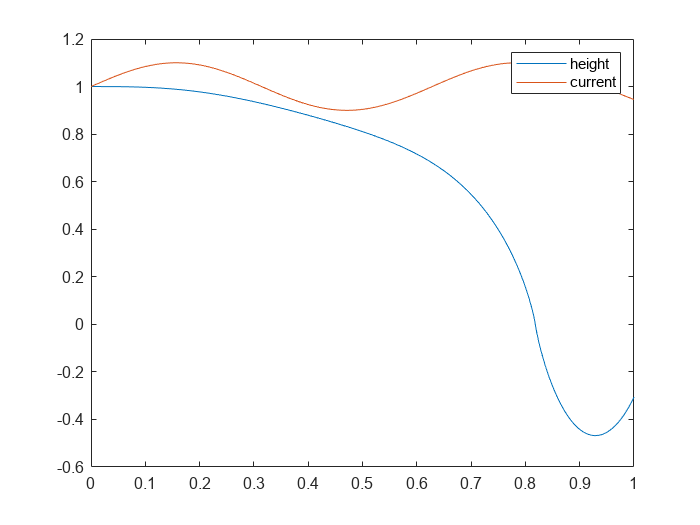
The ball is attracted to the magnet when the current first increases (h decreases). The subsequent decrease in current is not enough to bring it back.
h = 0 is a singularity for this model, that is, the ball hits the magnet. The LPV model ceases to be valid at this point.
You can sample the dynamics of an LPV model over a point or a grid of (,) values to obtain affine dynamics for a given time or parameter value.
For this example, dataFcnMaglev.m defines the matrices and offsets of a magnetic levitation system. The magnetic levitation controls the height of a levitating ball using a coil current that creates a magnetic force on the ball.
Create an LPV model.
lpvSys = lpvss('h',@dataFcnMaglev)Continuous-time state-space LPV model with 1 outputs, 1 inputs, 2 states, and 1 parameters. Model Properties
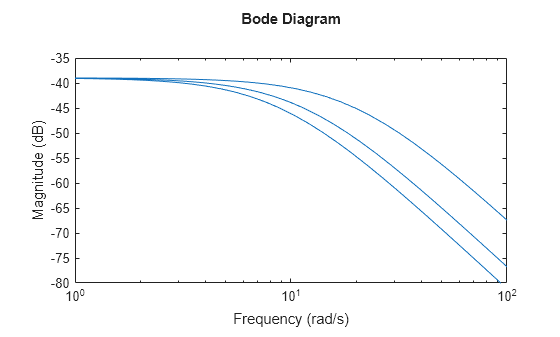
Sample the LPV dynamics at three h values to obtain local LTI models.
hmin = 0.05; hmax = 0.25; hcd = linspace(hmin,hmax,3); ssArray = psample(lpvSys,[],hcd); size(ssArray)
1x3 array of state-space models. Each model has 1 outputs, 1 inputs, and 2 states.
The function stores the model offsets in the Offsets property of the array.
ssArray.Offsets
ans=1×3 struct array with fields:
dx
x
u
y
Plot the Bode response.
bodemag(ssArray)
View the data function.
type dataFcnMaglev.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = dataFcnMaglev(~,p) % MAGLEV example: % x = [h ; dh/dt] % p=hbar (equilibrium height) mb = 0.02; % kg g = 9.81; alpha = 2.4832e-5; A = [0 1;2*g/p 0]; B = [0 ; -2*sqrt(g*alpha/mb)/p]; C = [1 0]; % h D = 0; E = []; dx0 = []; x0 = [p;0]; u0 = sqrt(mb*g/alpha)*p; % ibar y0 = p; % y = h = hbar + (h-hbar) Delays = [];
Since R2024a
This example shows how to create a linear parameter-varying model containing a varying delay. In this example, you also simulate a closed-loop plant with a controller containing an output delay and observe the effects of delayed controller response.
For this example, dataFcnMaglev.m defines the matrices and offsets of a magnetic levitation system. The magnetic levitation controls the height of a levitating ball using a coil current that creates a magnetic force on the ball.
Create an LPV model.
h0 = 1; % Note: Singular for h=0 G = lpvss("h",@dataFcnMaglev,0,0,h0);
This example also provides a data function maglevPD.m which defines a gain-scheduled PD controller for the magnetic levitation plant, containing a time-dependent output delay. This delay decreases with time.
PD = lpvss("h",@maglevPD,0,0,h0);Create the closed-loop response.
CL = feedback(G*PD,1);
Simulate the response to the true trajectory , which is the first state.
xinit = [h0;0;0]; % init: h=1 t = 0:1e-2:10; href = h0+0.5*sin(t); % desired height pFcn = @(t,x,u) x(1); [y1,~,x1,p1] = lsim(CL,href,t,xinit,pFcn);
Plot the simulation results and compare to reference height.
plot(t,href,t,y1,'r--') legend("Height reference","LPV simulation")
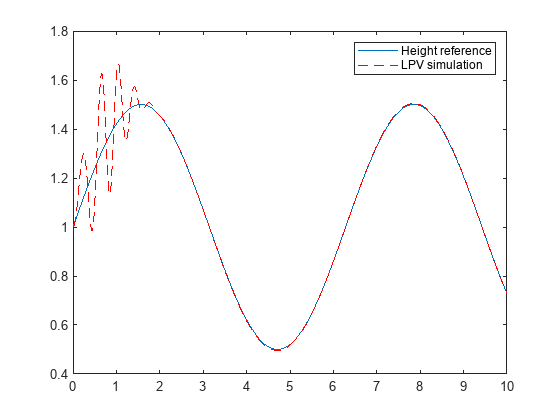
Because of the delay in controller action, the output signal also has a delayed response of tracking the reference input accurately. As the delay reduces over time, the LPV simulation matches the reference.
Data Functions
type dataFcnMaglev.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = dataFcnMaglev(~,p) % MAGLEV example: % x = [h ; dh/dt] % p=hbar (equilibrium height) mb = 0.02; % kg g = 9.81; alpha = 2.4832e-5; A = [0 1;2*g/p 0]; B = [0 ; -2*sqrt(g*alpha/mb)/p]; C = [1 0]; % h D = 0; E = []; dx0 = []; x0 = [p;0]; u0 = sqrt(mb*g/alpha)*p; % ibar y0 = p; % y = h = hbar + (h-hbar) Delays = [];
type maglevPD.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = maglevPD(t,p) % Gain-scheduled PD for MAGLEV example: % dz = A(p) z + B(p) e % u = u0 + C(p) z + D(p) e % p=h (equilibrium height) mb = 0.02; % kg g = 9.81; alpha = 2.4832e-5; a0 = 2*g/p; b0 = -2*sqrt(g*alpha/mb)/p; wn = 10; zeta = 0.7; Kp = (a0+wn^2)/b0; Kd = 2*zeta*wn/b0; % linear in p % Kp = (2*zeta*wn-a0)/b0; % Kd = wn^2/b0; wf = 100; A = -wf; B = wf; C = -wf*Kd; D = Kp+wf*Kd; E = []; dx0 = []; x0 = []; u0 = []; y0 = sqrt(mb*g/alpha)*p; % ibar, feedforward term Delays.Output = 0.1/(1+t); % decreasing delay Delays.Input = NaN; end
Version History
Introduced in R2023aSee Also
ltvss | getTestValue | setTestValue | sample | ssInterpolant