ltvss
Description
Use ltvss to represent linear state-space models whose dynamics
vary with time.
You can use ltvss to create continuous-time or discrete-time linear
time-varying state-space models. In continuous time, an ltvss model is
described by the following state-space equations.
Here, A(t), B(t), C(t), D(t), and E(t) are time-varying state-space matrices and δ0(t), x0(t), u0(t), and y0(t) are time-dependent derivative, state, input, and output offsets, respectively.
In discrete time, an ltvss model is described by the following
state-space equations.
Here, the integer index k counts the number of sampling periods
Ts.
You can use an ltvss object to model:
Linear systems whose coefficients vary in time.
Nonlinear systems operating along a specific trajectory. For an example, see LTV Model of Two-Link Robot.
Nonlinear systems operating near steady-state conditions that change in time.
Use ltvss to construct LTV models whose dynamics are described by a
MATLAB® function (the data function). Use ssInterpolant to
construct LTV models that interpolate LTI snapshots as a function of time. See LPV and LTV Models for functions and
operations applicable to ltvss objects.
Creation
Syntax
Description
ltvSys = ltvss(DataFcn)DataFcn is the name of or a
handle to the data function, the user-defined MATLAB function that calculates the matrices and offsets for given
t or k values.
ltvSys = ltvss(___,PropertyName=Value)
Input Arguments
Properties
Object Functions
Examples
Create a continuous-time SISO linear time-varying model.
This example uses a first-order model. The matrices and offsets are given by:
, , , ,
.
These matrices and offsets are defined in the ltvssDataFcn.m data function provided with this example.
Create an LTV model.
ltvSys = ltvss(@ltvssDataFcn)
Continuous-time state-space LTV model with 1 outputs, 1 inputs, and 1 states. Model Properties
View the data function.
type ltvssDataFcn.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = ltvssDataFcn(t) % SISO, first order A = -(1+0.5*sin(t)); B = 1; C = 1; D = 0; E = []; dx0 = []; x0 = []; u0 = []; y0 = 0.1*sin(5*t); Delays = [];
Create a discrete-time linear time-varying model.
This example uses a model with the matrices and offsets defined as:
These matrices and offsets are defined in the ltvFcnDiscrete.m data function provided with this example.
Specify the properties and create an LTV model.
Ts = 0.01; DataFcn = @ltvFcnDiscrete; ltvSys = ltvss(DataFcn,Ts)
Discrete-time state-space LTV model with 1 outputs, 1 inputs, and 1 states. Model Properties
You can set additional properties of the model using dot notation
ltvSys.InputName = 'u'; ltvSys.OutputName = 'y';
View the data function.
type ltvFcnDiscrete.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = ltvFcnDiscrete(k) A = sin(0.1*k); B = 1; C = 1; D = 0; E = []; dx0 = []; x0 = []; u0 = []; y0 = 0.1*sin(k); Delays = [];
For this example, ltvssDataFcn.m defines the matrices and offsets of a MIMO system.
Create an LTV model.
ltvSys = ltvss(@ltvssDataFcn);
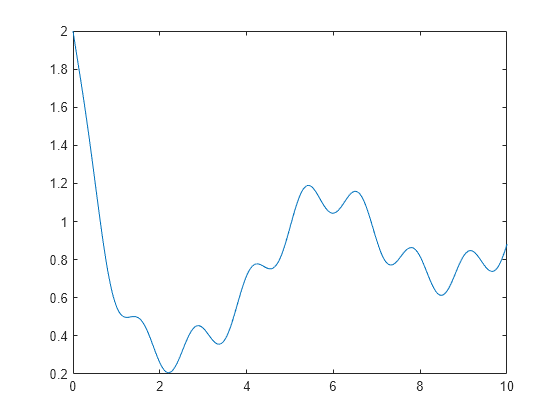
Simulate the response of this model to an arbitrary input from t = 0 to t = 10 seconds.
t = (0:.01:10)'; u = sin(0.2*t); x0 = 2;
Simulate and plot the response.
[y,~,x] = lsim(ltvSys,u,t,x0); plot(t,y)
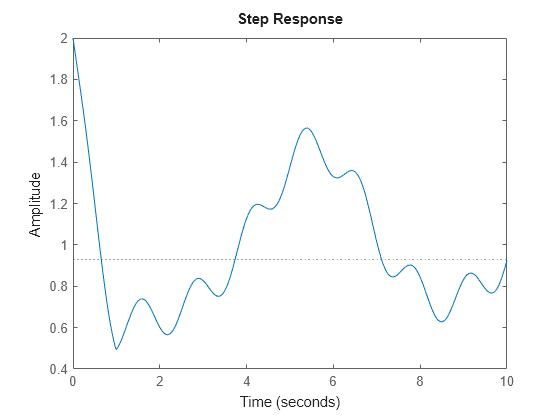
Now, simulate the model to step and impulse responses.
Create an option set using RespConfig to specify initial offset, and state values.
respOpt = RespConfig(InitialState=x0,Delay=1);
Compute the step response.
step(ltvSys,t,respOpt)
Compute the impulse response.
impulse(ltvSys,t,respOpt)

View the data function.
type ltvssDataFcn.mfunction [A,B,C,D,E,dx0,x0,u0,y0,Delays] = ltvssDataFcn(t) % SISO, first order A = -(1+0.5*sin(t)); B = 1; C = 1; D = 0; E = []; dx0 = []; x0 = []; u0 = []; y0 = 0.1*sin(5*t); Delays = [];
Since R2024a
This example shows how to create a linear time-varying model containing fixed and varying input and output delays.
This example uses a model with the matrices, offsets, and delays defined in this data function.
function [A,B,C,D,E,dx0,x0,u0,y0,Delays] = ltvDataFcnDelay(t) A = [-2 1;1 -0.5*(2+sin(10*t))]; B = [1 cos(t);sin(5*t) 0]; C = [1,2*cos(3*t);-1 3;sqrt(t) 0]; D = [0 0;-1 1;0 0.5*sin(t)]; E = []; dx0 = [cos(10*t)/(1+0.1*t);0]; x0 = [0;sqrt(t)/(1+0.1*t)]; u0 = [sin(10*t);1]; y0 = [1/(1+t);-1;cos(3*t)]; Delays.Input = [NaN;abs(cos(0.3*t))]; Delays.Output = [1.7;NaN;abs(sin(0.5*t))]; end
The delays argument is a structure with fields Input and Output specifying the delays corresponding input and output channels, respectively. This data function defines the delays as follows:
No delay at all times in the first input channel and a varying delay of s in the second input channel.
Fixed delay of 1.7 s in the first output channel, no delay in the second output channel, and a varying delay of s in the third output channel.
Create the LTV model.
ltvsysD = ltvss(@ltvDataFcnDelay)
Continuous-time state-space LTV model with 3 outputs, 2 inputs, and 2 states. Model Properties
The software manages and propagates specified delays when you perform operations such as sampling.
Sample the model at two values of time.
t = [3,5]; sys = psample(ltvsysD,t)
sys(:,:,1,1) [Time=3] =
A =
x1 x2
x1 -2 1
x2 1 -0.506
B =
u1 u2
x1 1 -0.99
x2 0.6503 0
C =
x1 x2
y1 1 -1.822
y2 -1 3
y3 1.732 0
D =
u1 u2
y1 0 0
y2 -1 1
y3 0 0.07056
Input delays (seconds): 0 0.622
Output delays (seconds): 1.7 0 0.997
sys(:,:,1,2) [Time=5] =
A =
x1 x2
x1 -2 1
x2 1 -0.8688
B =
u1 u2
x1 1 0.2837
x2 -0.1324 0
C =
x1 x2
y1 1 -1.519
y2 -1 3
y3 2.236 0
D =
u1 u2
y1 0 0
y2 -1 1
y3 0 -0.4795
Input delays (seconds): 0 0.0707
Output delays (seconds): 1.7 0 0.598
1x2 array of continuous-time state-space models.
Model Properties
The sampled LTV model contains fixed delays and delays varying with time as defined in the data function.