Mechanische Systeme
Erkunden Sie Beispiele, die die Modellierung, Regelung und Simulation mechanischer Systeme veranschaulichen.
Verwandte Informationen
Enthaltene Beispiele

Masse-Feder-Dämpfer mit Regelungssystem
In diesem Beispiel ist ein geregelter Masse-Feder-Dämpfer dargestellt. Ein Regelungssystem passt die auf die Masse angewandte Kraft an, damit ihre Position ein Befehlssignal nachverfolgt. Die Anfangsgeschwindigkeit der Masse beträgt 10 Meter pro Sekunde. Das Regelungssystem passt die von der Kraftquelle ausgeübte Kraft an, um die Sprungänderungen des Eingangssignals nachzuverfolgen.
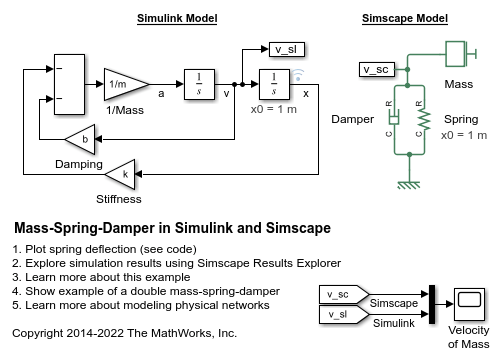
Masse-Feder-Dämpfer in Simulink und Simscape
Dieses Beispiel vergleicht ein Masse-Feder-Dämpfer-Modell, das Blöcke und physische Verbindungen von Simscape™ verwendet, mit einem Modell, das Simulink®-Blöcke und -Signale verwendet.

Doppelter Masse-Feder-Dämpfer in Simulink und Simscape
Dieses Beispiel zeigt zwei Modelle eines doppelten Masse-Feder-Dämpfers: eines mit Simulink®-Eingangs-/Ausgangsblöcken und eines mit physikalischen Simscape™-Netzen.
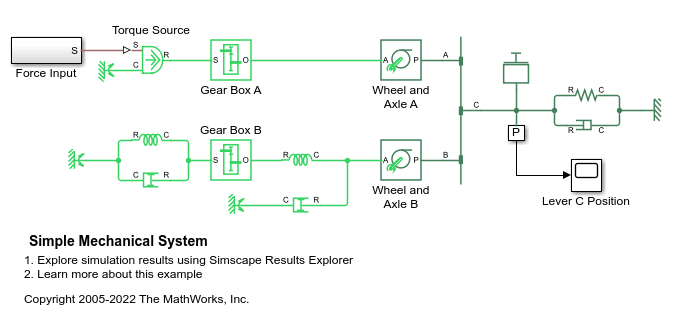
Einfaches mechanisches System
Dieses Beispiel zeigt das Modell eines Systems, das Rotations- und Translationsbewegungen miteinander verbindet. Ein Summierhebel treibt eine Last an, die aus einer Masse, viskoser Reibung und einer Feder besteht, die mit Gelenk C des Hebels verbunden ist. Gelenk B ist an zwei Drehfedern aufgehängt, die über ein Rad und eine Achse sowie ein Getriebe mit dem Bezugspunkt verbunden sind. Gelenk A ist über ein Getriebe und einen Rad-und-Achsen-Mechanismus mit einer Drehmomentquelle verbunden.
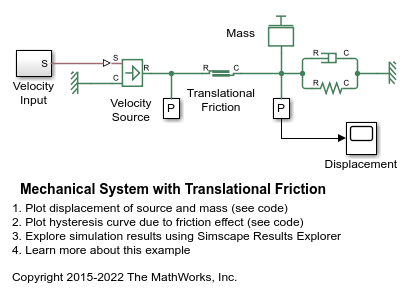
Mechanisches System mit Translationsreibung
Dieses Beispiel zeigt eine Masse, die an einer Feder und einem viskosen Dämpfer angebracht ist. Die Masse wird von einer idealen Geschwindigkeitsquelle über ein Reibungselement angesteuert. Das Bewegungsprofil der Quelle wird so ausgewählt, dass die Darstellung der Verschiebung der Masse gegenüber der von der Quelle bereitgestellten Verschiebung eine typische Hysteresekurve ergibt.

Mechanisches System mit translatorischem Endanschlag
Dieses Beispiel zeigt zwei Massen, die durch einen Endanschlag verbunden sind. Masse 1 wird von einer idealen Geschwindigkeitsquelle angesteuert. Wenn der Geschwindigkeitseingang die Richtung ändert, bleibt Masse 2 in Ruhe, bis Masse 1 das andere Ende des Totgangs erreicht, der durch den translatorischen Endanschlag modelliert wird. Die Darstellung der Verschiebung von Masse 2 gegenüber der Verschiebung von Masse 1 ergibt eine typische Hysteresekurve.
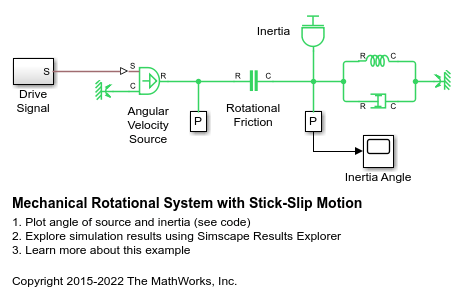
Mechanisches Rotationssystem mit Haft-Gleit-Bewegung
Dieses Modell zeigt ein mechanisches Rotationssystem mit Haft-Gleit-Reibung. Eine Trägheit ist über eine Feder und einen Dämpfer mit einem festen Punkt verbunden. Die Trägheit wird von einer Geschwindigkeitsquelle über ein Haft-Gleit-Reibungselement angesteuert. Das Reibungselement weist eine Differenz zwischen der Losbrech- und der Coulomb-Reibung auf, was zu einer Haft-Gleit-Bewegung der Trägheit führt.
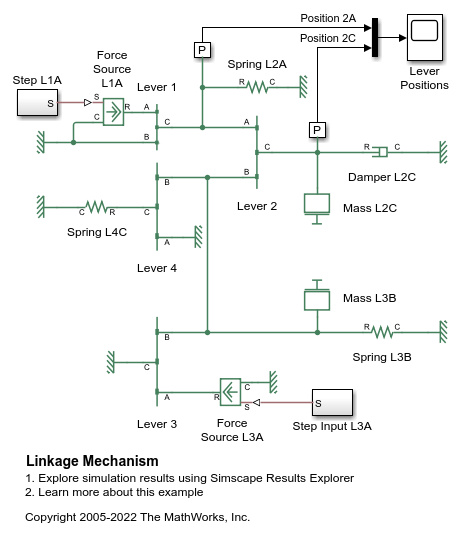
Verbindungsmechanismus
Dieses Beispiel veranschaulicht die Verwendung des Simscape™-Blocks „Lever“ in einem Verbindungsmechanismus. „Lever 1“ und „Lever 4“ sind Hebel erster Klasse mit dem Drehpunkt am Ende. „Lever 3“ ist ein Hebel zweiter Klasse mit dem Drehpunkt in der Mitte. „Lever 2“ ist ein Summierhebel, der vom ersten und dritten Hebel angesteuert wird.

Pendulum in Cartesian and Polar Coordinates
Two different implementations of a planar pendulum.

Berechnen von Pi mithilfe kollidierender Massen
In diesem Beispiel wird die Leistungsfähigkeit des Solvers anhand eines bekannten physikalischen Problems veranschaulicht, indem Zehntausende instantaner Ereignisse erfasst werden, die in weniger als einer Sekunde auftreten. Auf einem eindimensionalen Pfad nähert sich eine große Masse einer kleinen Masse, die auf der abgewandten Seite von einer Wand begrenzt wird. Trifft die große Masse auf die kleine Masse, prallt die kleine Masse von der Wand ab und kehrt ihre Richtung zur großen Masse um. Jede Kollision ist perfekt elastisch. Wenn sich die große Masse der Wand nähert, kommt es immer schneller zu Kollisionen mit der kleinen Masse, bis die große Masse die Richtung umkehrt und sich schließlich schnell genug in die entgegengesetzte Richtung bewegt, sodass sie von der kleinen Masse nie eingeholt wird.