Entwurf eines LQG-Servoreglers
Dieses Beispiel zeigt den Entwurf eines Servoreglers für das folgende System.
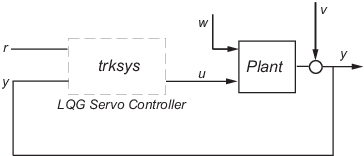
Die Regelstrecke enthält drei Zustände (x), zwei Steuerungseingänge (u), zwei Zufallseingänge (w), einen Ausgang (y), Messrauschen für den Ausgang (v) und die folgenden Zustands- und Messgleichungen:
Dabei gilt:
Das Rauschen im System lässt sich mit den folgenden Kovarianzdaten darstellen:
Verwenden Sie die folgende Aufwandsfunktion, um den Kompromiss zwischen Tracker-Leistung und Steuerungsaufwand zu definieren:
So entwerfen Sie einen LQG-Servoregler für dieses System:
Erstellen Sie das Zustandsraumsystem, indem Sie im MATLAB®-Befehlsfenster Folgendes eingeben:
A = [0 1 0;0 0 1;1 0 0]; B = [0.3 1;0 1;-0.3 0.9]; G = [-0.7 1.12; -1.17 1; .14 1.5]; C = [1.9 1.3 1]; D = [0.53 -0.61]; H = [-1.2 -0.89]; sys = ss(A,[B G],C,[D H]);
Konstruieren Sie die optimale Zustands-Feedback-Verstärkung unter Verwendung der gegebenen Aufwandsfunktion, indem Sie die folgenden Befehle eingeben:
nx = 3; %Number of states ny = 1; %Number of outputs Q = blkdiag(0.1*eye(nx),eye(ny)); R = [1 0;0 2]; K = lqi(ss(A,B,C,D),Q,R);
Konstruieren Sie die Kalman-Zustandsschätzfunktion unter Verwendung der gegebenen Kovarianzdaten für das Rauschen, indem Sie die folgenden Befehle eingeben:
Qn = [4 2;2 1]; Rn = 0.7; kest = kalman(sys,Qn,Rn);
Bilden Sie den LQG-Servoregler, indem Sie mit den folgenden Befehlen die Kalman-Zustandsschätzfunktion und die optimale Zustands-Feedback-Verstärkung verbinden:
Dieser Befehl gibt den folgenden LQG-Servoregler zurück:trksys = lqgtrack(kest,K)
>> trksys = lqgtrack(kest,K) a = x1_e x2_e x3_e xi1 x1_e -2.373 -1.062 -1.649 0.772 x2_e -3.443 -2.876 -1.335 0.6351 x3_e -1.963 -2.483 -2.043 0.4049 xi1 0 0 0 0 b = r1 y1 x1_e 0 0.2849 x2_e 0 0.7727 x3_e 0 0.7058 xi1 1 -1 c = x1_e x2_e x3_e xi1 u1 -0.5388 -0.4173 -0.2481 0.5578 u2 -1.492 -1.388 -1.131 0.5869 d = r1 y1 u1 0 0 u2 0 0 Input groups: Name Channels Setpoint 1 Measurement 2 Output groups: Name Channels Controls 1,2 Continuous-time model.