SLAM
Bei der simultanen Lokalisierung und Kartierung (SLAM) werden sowohl Abbildung als auch -Algorithmen verwendet, um eine Karte zu erstellen und gleichzeitig Ihr Fahrzeug in dieser Karte zu lokalisieren. Verwenden Sie lidarSLAM, um Ihren eigenen SLAM-Algorithmus zu optimieren, der Lidar-Scans und Odometrie-Pose-Schätzungen verarbeitet, um iterativ eine Karte zu erstellen. Verwenden Sie buildMap, um aus protokollierten und gefilterten Daten mithilfe von SLAM eine Karte zu erstellen. Mit der SLAM Map Builder-App können Sie relative Posen manuell ändern und Scans ausrichten, um die Genauigkeit Ihrer Karte zu verbessern.
Weitere Informationen darüber, was SLAM ist und welche anderen SLAM-Tools in anderen MATLAB®-Toolboxes enthalten sind, finden Sie unter Was ist SLAM?.
Apps
| SLAM Map Builder | Erstellen Sie 2D-Rasterkarten mit SLAM auf Lidar-Basis |
Funktionen
Themen
- Choose SLAM Workflow Based on Sensor Data
Choose the right simultaneous localization and mapping (SLAM) workflow and find topics, examples, and supported features.
- Factor Graph for SLAM
Learn about factor graph and how it use it for SLAM applications.
Enthaltene Beispiele

Performant and Deployable Monocular Visual SLAM
Visual simultaneous localization and mapping (vSLAM) refers to the process of calculating the position and orientation of a camera with respect to its surroundings while simultaneously mapping the environment. Applications for vSLAM include augmented reality, robotics, and autonomous driving. In this example, the algorithm uses only visual inputs from the camera.

Build a Map from Lidar Data Using SLAM
Process 3-D lidar data from a sensor on a vehicle to progressively build a map and estimate the trajectory using SLAM.

Monocular Visual-Inertial Odometry (VIO) Using Factor Graph
Implement monocular visual-inertial odometry to localize a UAV using camera and IMU data, optimized by a factor graph.

Factor Graph-Based Pedestrian Localization with IMU and GPS Sensors
Estimate the position of a pedestrian using logged sensor data from an inertial measurement unit (IMU) and Global Positioning System (GPS) receiver and a factor graph.
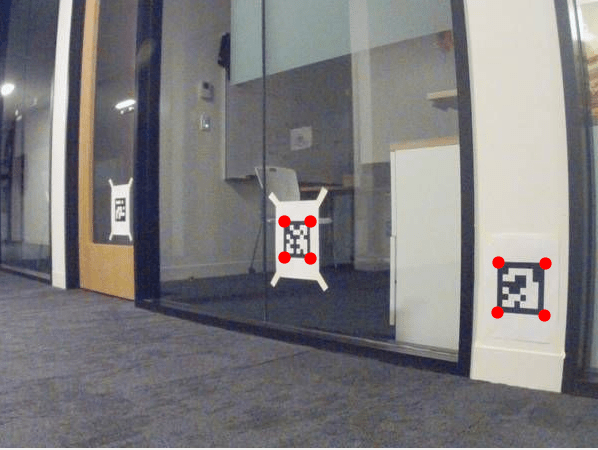
Landmark SLAM Using AprilTag Markers
Combine robot odometry data and AprilTag markers to implement SLAM with a factor graph and pose graph, and compare the results.

Map Indoor Area Using Lidar SLAM and Factor Graph
Implement offline lidar SLAM on collected lidar scans to map an indoor area using a factor graph and lidar scan map.

Build and Deploy Visual SLAM Algorithm with ROS in MATLAB
Implement a monocular visual SLAM algorithm to estimate camera poses and deploy generated C++ code using ROS.

Simulate RGB-D Visual SLAM System with Cosimulation in Gazebo and Simulink
Use RGB and depth images from a robot to simulate a RGB-D visual SLAM system in Simulink.

EKF-Based Landmark SLAM
Implement landmark SLAM using the Extended Kalman Filter algorithm to track the path of a vehicle and map the surroundings.

Implementieren Sie Simultaneous Localization And Mapping (SLAM) mit Lidar-Scans
Implementieren Sie Offline-SLAM mithilfe eines Pose-Graphen und einer Sammlung von Lidar-Scans und erstellen Sie eine Karte der Umgebung.