Lokalisierungsalgorithmen
Lokalisierungsalgorithmen wie Monte-Carlo-Lokalisierung und Scan-Matching schätzen Ihre Pose in einer bekannten Karte mithilfe von Entfernungssensor- oder Lidar-Messungen. Pose-Graphen erfassen Ihre geschätzten Posen und können auf Basis von Randbedingungen und Schleifenschlüssen (Loop Closures) optimiert werden. Für simultane Lokalisierung und Kartierung siehe SLAM.
Funktionen
Themen
- Compose a Series of Laser Scans with Pose Changes
Use the
matchScansfunction to compute the pose difference between a series of laser scans. - Minimize Search Range in Grid-based Lidar Scan Matching Using IMU
This example shows how to use an inertial measurement unit (IMU) to minimize the search range of the rotation angle for scan matching algorithms.
- Monte Carlo Localization Algorithm
The Monte Carlo Localization (MCL) algorithm is used to estimate the position and orientation of a robot.
- Particle Filter Workflow
A particle filter is a recursive, Bayesian state estimator that uses discrete particles to approximate the posterior distribution of the estimated state.
- Particle Filter Parameters
To use the
stateEstimatorPF(Robotics System Toolbox) particle filter, you must specify parameters such as the number of particles, the initial particle location, and the state estimation method.
Enthaltene Beispiele

Monocular Visual-Inertial Odometry (VIO) Using Factor Graph
Implement monocular visual-inertial odometry to localize a UAV using camera and IMU data, optimized by a factor graph.

Factor Graph-Based Pedestrian Localization with IMU and GPS Sensors
Estimate the position of a pedestrian using logged sensor data from an inertial measurement unit (IMU) and Global Positioning System (GPS) receiver and a factor graph.

Map Indoor Area Using Lidar SLAM and Factor Graph
Implement offline lidar SLAM on collected lidar scans to map an indoor area using a factor graph and lidar scan map.
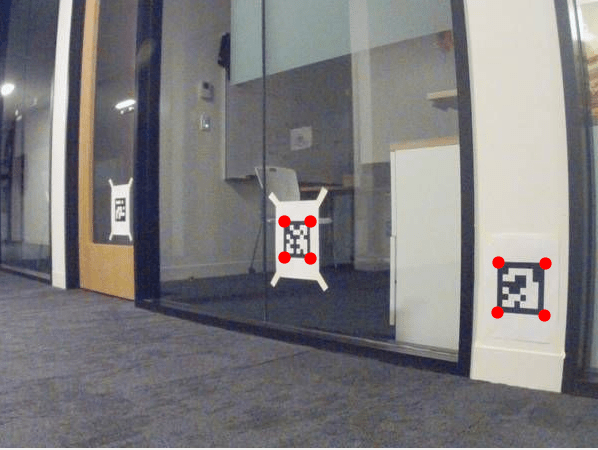
Landmark SLAM Using AprilTag Markers
Combine robot odometry data and AprilTag markers to implement SLAM with a factor graph and pose graph, and compare the results.

Localize TurtleBot Using Monte Carlo Localization Algorithm
Apply the Monte Carlo Localization algorithm on a TurtleBot® robot in a simulated Gazebo® environment.
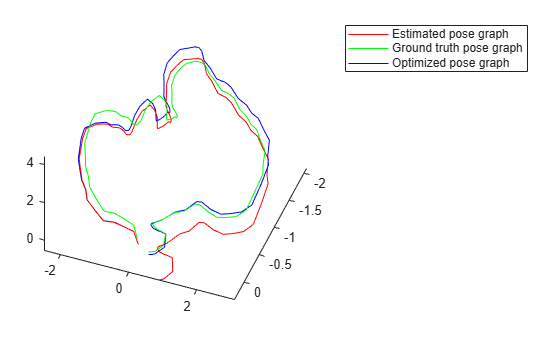
Reduce Drift in 3-D Visual Odometry Trajectory Using Pose Graphs
Reduce the drift in the estimated trajectory (location and orientation) of a monocular camera using 3-D pose graph optimization. Visual odometry estimates the current global pose of the camera (current frame). Because of poor matching or errors in 3-D point triangulation, robot trajectories often tends to drift from the ground truth. Loop closure detection and pose graph optimization reduce this drift and correct for errors.

Estimate Camera-to-IMU Transformation Using Extrinsic Calibration
Use extrinsic calibration to estimate SE(3) transformation from camera to IMU for VINS workflows.