poseGraphSolverOptions
Solver options for pose graph optimization
Description
solverOptions = poseGraphSolverOptions(solverType)
Examples
Optimize a pose graph based on the nodes and edge constraints. Trim loop closed based on their edge residual errors.
Load the data set that contains a 2-D pose graph. Inspect the poseGraph object to view the number of nodes and loop closures.
load grid-2d-posegraph.mat pg disp(pg)
poseGraph with properties:
NumNodes: 120
NumEdges: 193
NumLoopClosureEdges: 74
LoopClosureEdgeIDs: [120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 … ] (1×74 double)
LandmarkNodeIDs: [1×0 double]
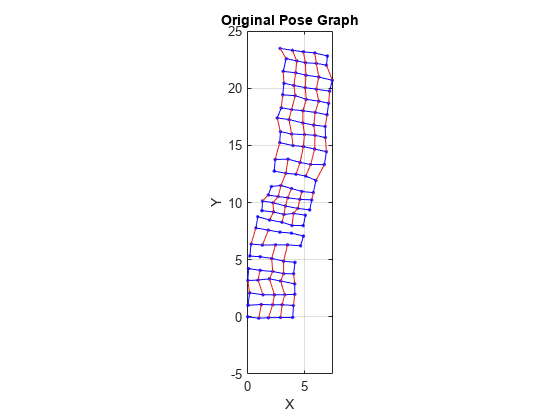
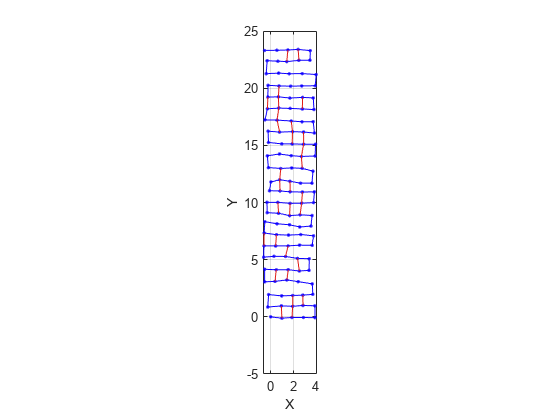
Plot the pose graph with IDs off. Red lines indicate loop closures identified in the dataset. The poses in the graph should follow a grid pattern, but show evidence of drift over time.
show(pg,'IDs','off'); title('Original Pose Graph')
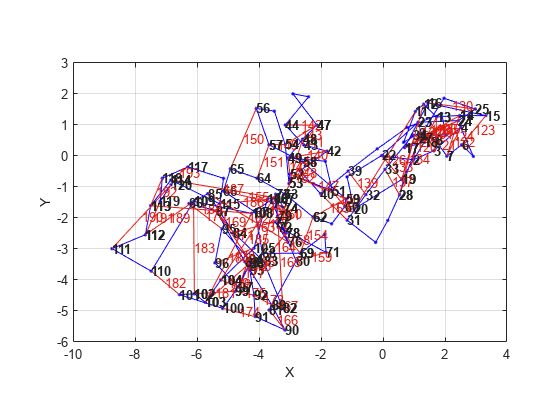
Optimize the pose graph using the optimizePoseGraph function. By default, this function uses the "builtin-trust-region" solver. Because the pose graph contains some bad loop closures, the resulting pose graph is actual not desirable.
pgOptim = optimizePoseGraph(pg); figure; show(pgOptim);
Look at the edge residual errors for the original pose graph. Large outlier error values at the end indicate bad loop closures.
resErrorVec = edgeResidualErrors(pg);
plot(resErrorVec);
title('Edge Residual Errors by Edge ID')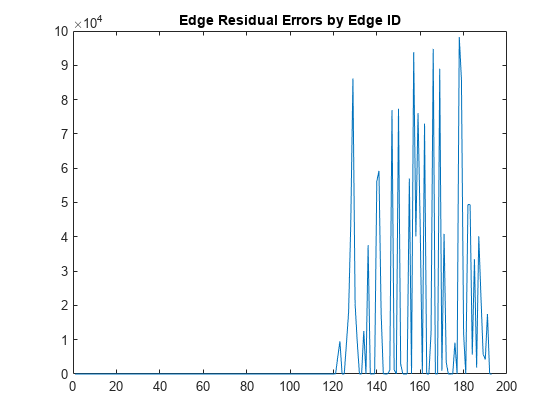
Certain loop closures should be trimmed from the pose graph based on their residual error. Use the trimLoopClosures function to trim these bad loop closures. Set the maximum and truncation threshold for the trimmer parameters. This threshold is set based on the measurement accuracy and should be tuned for your system.
trimParams.MaxIterations = 100; trimParams.TruncationThreshold = 25; solverOptions = poseGraphSolverOptions;
Use the trimLoopClosures function with the trimmer parameters and solver options.
[pgNew, trimInfo, debugInfo] = trimLoopClosures(pg,trimParams,solverOptions);
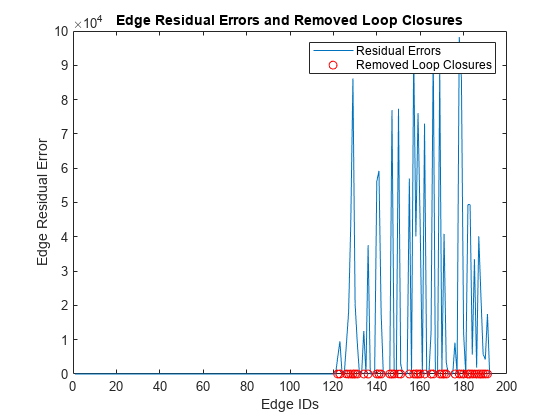
From the trimInfo output, plot the loop closures removed from the optimized pose graph. By plotting with the residual errors plot before, you can see the large error loop closures were removed.
removedLCs = trimInfo.LoopClosuresToRemove; hold on plot(removedLCs,zeros(length(removedLCs)),'or') title('Edge Residual Errors and Removed Loop Closures') legend('Residual Errors', 'Removed Loop Closures') xlabel('Edge IDs') ylabel('Edge Residual Error') hold off
Show the new pose graph with the bad loop closures trimmed.
show(pgNew,"IDs","off");
Input Arguments
Output Arguments
Version History
Introduced in R2020b
See Also
Functions
trimLoopClosures|edgeResidualErrors|edgeResidualErrors|removeEdges|edgeNodePairs|edgeConstraints