Optimierung des PID-Reglers
Die Software der Control System Toolbox™ bietet verschiedene Tools und Befehle zum Optimieren von PID-Reglern. Weitere Informationen zur Auswahl des besten Tools für Ihre Anwendung finden Sie unter Auswählen eines Tools zum Entwerfen von PID-Reglern.
Informationen zum Optimieren von PID-Reglern in Simulink®-Modellen finden Sie unter Model-Based PID Controller Tuning (Simulink Control Design).
Apps
| PID Tuner | Optimieren von PID-Reglern |
Live Editor Tasks
| Tune PID Controller | Tune PID Controller for LTI plant in the Live Editor |
Funktionen
pidtune | PID tuning algorithm for linear plant model |
pidtuneOptions | Define options for pidtune function |
getPIDLoopResponse | Closed-loop and open-loop responses of systems with PID controllers |
pidTuner | Open PID Tuner for PID tuning |
Themen
Grundlagen der PID-Optimierung
- Auswählen eines Tools zum Entwerfen von PID-Reglern
Die Control System Toolbox-Software stellt mehrere Tools zum Entwerfen von PID-Reglern bereit. - Entwerfen von PID-Reglern mit PID Tuner
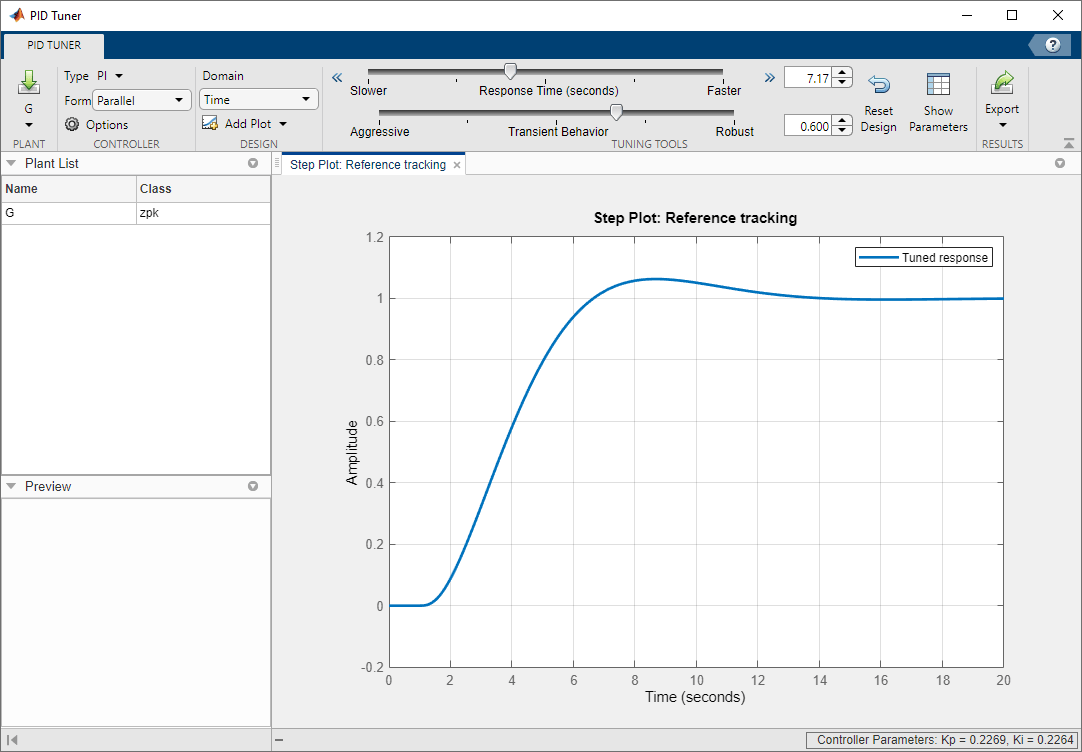
PID Tuner ermöglicht Ihnen das automatische, interaktive Optimieren von PID-Reglern. - PID Controller Types for Tuning
Control System Toolbox PID tuning tools can generate and tune many PID and 2-DOF PID controller types.
Interaktive PID-Optimierung
- Entwurf von PID-Reglern für eine schnelle Referenzverfolgung
Optimieren Sie einen PID-Regler, um die Anforderungen an Anstiegszeit und Einschwingzeit zu erfüllen. - Optimierung eines PID-Reglers zugunsten der Referenzverfolgung oder zugunsten der Störgrößenkompensation (PID Tuner)
Die PID-Optimierung ist ein Kompromiss zwischen der Leistung der Referenzverfolgung und der Leistung der Störgrößenkompensation. In diesem Beispiel wird gezeigt, wie mit PID Tuner zugunsten der einen oder der anderen Funktion optimiert werden kann. - PID Controller Design in the Live Editor
Use the Tune PID Controller task to generate code in the Live Editor for designing a PID controller for a linear plant model. - Entwurf in PID Tuner analysieren
PID Tuner stellt Systemantwortdiagramme und weitere Tools zum Optimieren von PID-Reglern bereit.
Befehlszeile für PID-Optimierung
- PID Controller Design at the Command Line
Programmatically tune a PID controller using thepidtunecommand. - Optimierung eines PID-Reglers zugunsten der Referenzverfolgung oder zugunsten der Störgrößenkompensation (Befehlszeile)
Verwenden Sie die Optimierungsoptionen des Befehlspidtunefür die Optimierung zugunsten der Referenzverfolgung oder zugunsten der Störgrößenkompensation über die Befehlszeile. - Entwickeln eines Kaskaden-Regelungssystems mit PI-Reglern
Entwickeln Sie mithilfe des Befehlspidtunezwei PI-Regler für ein Kaskaden-Regelungssystem.
PID-Reglerentwurf aus gemessenen Antwortdaten
- Regelstreckenparameter interaktiv anhand von Antwortdaten schätzen
Mit der System Identification Toolbox™-Software können Sie PID Tuner verwenden, um ein lineares Regelstreckenmodell anhand der Antwortdaten, die in Ihrem System gemessen wurden, zu schätzen. Danach optimiert PID Tuner einen PID-Regler für das resultierende Modell. - Tune PID Controller from Measured Plant Data in Live Editor
Use Live Editor Tasks to generate code for tuning a PID controller based on measured plant response. - Systemidentifikation für die PID-Regelung
Systemidentifikation ist der Prozess, in dem basierend auf der Systemantwort auf eine bekannte Erregung eine dynamische Darstellung des Systems, das Sie regeln möchten, geschätzt wird.
PID-Regler mit zwei Freiheitsgraden
- Tune 2-DOF PID Controller (PID Tuner)
Design a two-degree-of-freedom (2-DOF) PID controller, and compare the controller performance with that of a 1-DOF PID controller. - Tune 2-DOF PID Controller (Command Line)
Design a two-degree-of-freedom (2-DOF) PID controller, and compare the controller performance with that of a 1-DOF PID controller.
Optimierung in Simulink
- PID Controller Tuning in Simulink
You can tune the gains of PID Controller blocks to achieve a robust design with the desired response time using PID Tuner. - Design PID Controller Using Simulated I/O Data
This example shows how to tune a PID controller for plants that cannot be linearized. - Design PID Controller Using Estimated Frequency Response
When your plant cannot be linearized, you can estimate a plant model using frequency response estimation and import the plant model into PID Tuner.
PID-Algorithmus
- Algorithmus zur PID-Optimierung
Der in MathWorks® eingesetzte Algorithmus zur Optimierung von PID-Reglern optimiert die PID-Verstärkungsfaktoren, um einen guten Ausgleich zwischen Leistung und Robustheit zu erreichen.
Enthaltene Beispiele
Design PID Controller for Disturbance Rejection Using PID Tuner
Design a PI controller with good disturbance rejection performance using the PID Tuner app. The example also shows how to design an ISA-PID controller for both good disturbance rejection and good reference tracking.

Temperature Control in Heat Exchanger
Design feedback and feedforward compensators to regulate the temperature of a chemical reactor through a heat exchanger.
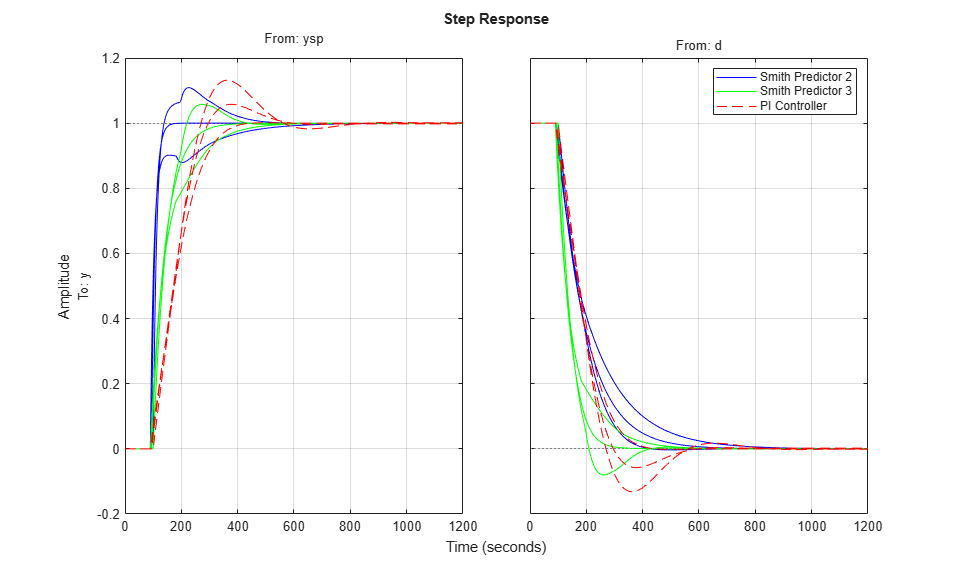
Control of Processes with Long Dead Time: The Smith Predictor
The limitations of PI control for processes with long dead time and illustrates the benefits of a control strategy called "Smith Predictor."