Entwurf in PID Tuner analysieren
In der Control System Toolbox™ stellt PID Tuner Systemantwortdiagramme und weitere Tools zum Optimieren von PID-Reglern für Regelstrecken, die durch LTI-Modelle dargestellt werden, bereit.
Informationen zur Analyse in PID Tuner mit Simulink®-Modellen finden Sie unter Analyze Design in PID Tuner (Simulink Control Design).
Systemantworten in einem Diagramm darstellen
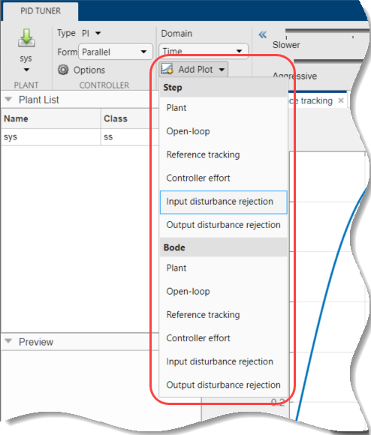
Um zu bestimmen, ob der Kompensatorentwurf Ihre Anforderungen erfüllt, können Sie mit den Antwortdiagrammen die Systemantwort analysieren. Wählen Sie auf der Registerkarte PID Tuner ein Antwortdiagramm im Menü Add Plot aus. Im Menü Add Plot können Sie auch unter verschiedenen Sprungdiagrammen (Zeitbereichsantwort) oder Bode-Diagrammen (Frequenzbereichsantwort) wählen.
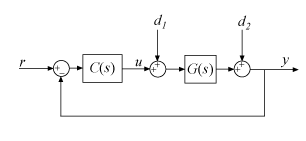
Bei 1-DOF-PID-Reglern, wie zum Beispiel der Typen PI, PIDF und PDF, berechnet die Software die Systemantworten basierend auf der folgenden einschleifigen Architektur, wobei G Ihre angegebene Regelstrecke und C der PID-Regler ist:
Bei 2-DOF-PID-Reglern, wie zum Beispiel der Typen PI2, PIDF2 und I-PD, berechnet die Software die Antworten basierend auf der folgenden Architektur:
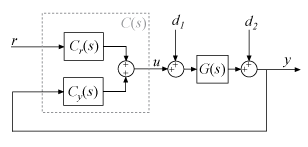
Die Systemantworten basieren auf der Zerlegung des 2-DOF-PID-Reglers C in eine Sollwert-Komponente Cr und eine Feedback-Komponente Cy, wie in PID-Regler mit zwei Freiheitsgraden beschrieben.
In der folgenden Tabelle finden Sie eine Zusammenfassung der verfügbaren Antworten für Analysediagramme. (Für Regelstrecken mit Frequenzgangdaten, wie zum Beispiel frd-Modelle, sind Antwortdiagramme im Zeitbereich nicht verfügbar.)
| Antwort | Dargestelltes System (1-DOF) | Dargestelltes System (2-DOF) | Beschreibung |
|---|---|---|---|
Plant | G | G | Regelstreckenantwort. Zum Untersuchen der Regelstreckendynamik verwenden. |
Open-loop | GC | –GCy | Antwort des offenen Regelkreises mit Regler und Regelstrecke. Für den Frequenzbereichsentwurf verwenden. Verwenden, wenn Robustheitskriterien, wie zum Beispiel Amplitudenrand und Phasenrand des offenen Regelkreises, zu Ihren Entwurfsspezifikationen gehören. |
Reference tracking | (von r bis y) | (von r bis y) | Antwort des geschlossenen Regelkreises auf eine Sprungänderung des Sollwertes. Verwenden, wenn Sollwertverfolgung zu Ihren Entwurfsspezifikationen gehört. |
Controller effort | (von r bis u) | (von r bis u) | Antwort am Ausgang des Reglers auf eine Sprungänderung des Sollwertes. Verwenden, wenn Ihr Entwurf durch praktische Randbedingungen, wie zum Beispiel Reglersättigung, beschränkt ist. |
Input disturbance rejection | (von d1 bis y) | (von d1 bis y) | Antwort des geschlossenen Regelkreises auf eine Laststörung (sprungartige Störung am Eingang der Regelstrecke). Verwenden, wenn die Kompensation von Eingangsstörgrößen zu Ihren Entwurfsspezifikationen gehört. |
Output disturbance rejection | (von d2 bis y) | (von d2 bis y) | Antwort des geschlossenen Regelkreises auf eine sprungartige Störung am Ausgang der Regelstrecke. Verwenden, wenn Sie auf Empfindlichkeit gegenüber Modellierungsfehlern analysieren möchten. |
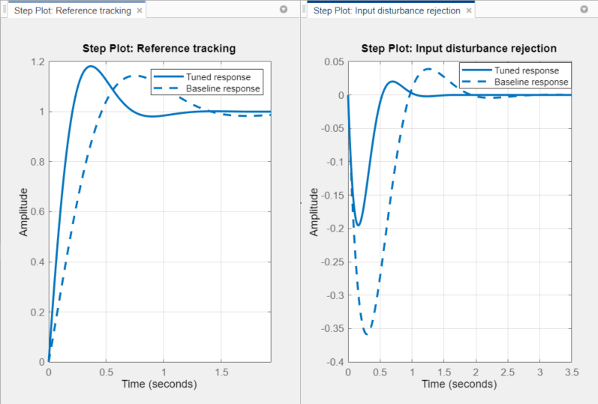
„Tuned Response“ mit „Baseline Response“ vergleichen
Wenn Sie einen Referenzregler definiert haben, zeigt PID Tuner standardmäßig die Antworten unter Verwendung des aktuellen PID Tuner-Entwurfs und die Antworten unter Verwendung des Referenzreglers an.
Zum Definieren eines Referenzreglers gibt es zwei Möglichkeiten.
Laden eines Referenzreglers beim Öffnen von PID Tuner unter Verwendung der Syntax
pidTuner(sys,C0).Definieren des aktuellen PID Tuner-Entwurfs als Referenzregler durch Klicken auf den Pfeil unter Export
 und Auswählen von
und Auswählen von Save as Baseline.
Bei dieser Aktion wird die aktuelle Tuned response als Baseline response definiert. Bei weiterer Anpassung des aktuellen Entwurfs wird eine neue Tuned response-Linie erstellt.
Um die Baseline response auszublenden, klicken Sie auf
 Options und deaktivieren Show Baseline Controller Data.
Options und deaktivieren Show Baseline Controller Data.
Numerische Werte von Systemeigenschaften anzeigen
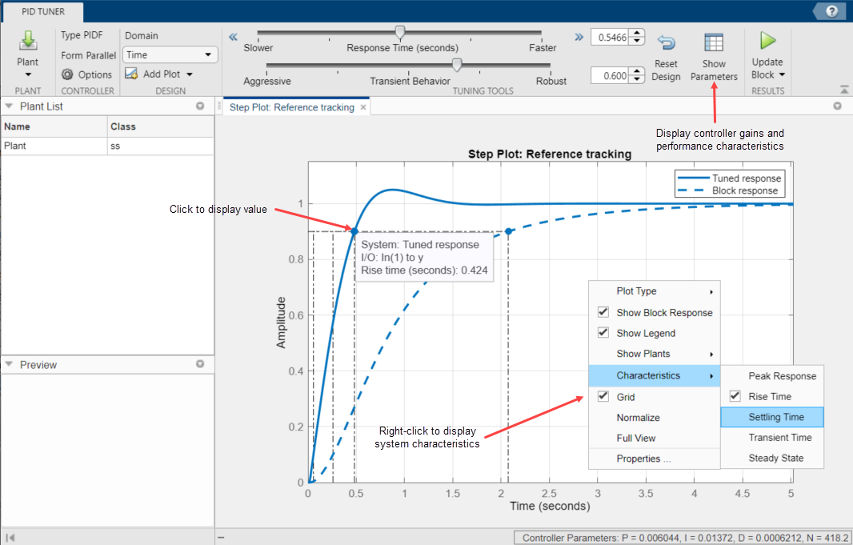
Sie können die Werte von Systemeigenschaften, wie zum Beispiel Spitzenantwort und Amplitudenrand, wie folgt anzeigen:
Direkt im Antwortdiagramm: Verwenden Sie durch Klicken mit der rechten Maustaste das Kontextmenü, um Eigenschaften hinzuzufügen (Option „Characteristics“), die als blaue Marken angezeigt werden. Klicken Sie dann mit der linken Maustaste auf die Marke, um den entsprechenden Datenbereich anzuzeigen.
In der Tabelle Performance and robustness: Um diese Tabelle anzuzeigen, klicken Sie auf
 Show Parameters.
Show Parameters.
Den Entwurf verfeinern
Wenn die Antwort des ersten Reglerentwurfs Ihre Anforderungen nicht erfüllt, können Sie den Entwurf interaktiv anpassen. PID Tuner bietet Ihnen zwei Domain-Optionen zum Verfeinern des Reglerentwurfs:
Time(Standard): Verwenden Sie den Schieberegler Response Time, um eine schnellere oder langsamere Antwort des geschlossenen Regelkreises einzustellen. Verwenden Sie den Schieberegler Transient Behavior, um für den Regler ein aggressiveres Verhalten bei der Störgrößenkompensation oder mehr Robustheit gegenüber Regelstreckenunsicherheit einzustellen.Frequency: Verwenden Sie den Schieberegler Bandwidth, um eine schnellere oder langsamere Antwort des geschlossenen Regelkreises einzustellen (die Antwortzeit ist 2/wc, wobei wc die Bandbreite ist). Verwenden Sie den Schieberegler Phase Margin, um für den Regler ein aggressiveres Verhalten bei der Störgrößenkompensation oder mehr Robustheit gegenüber Regelstreckenunsicherheit einzustellen.
In beiden Modi besteht ein Zielkonflikt zwischen der Leistung der Referenzverfolgung und der Leistung der Störgrößenkompensation. Ein Beispiel, in dem gezeigt wird, mit welcher Einstellung der Schieberegler für diesen Zielkonflikt ein Kompromiss gefunden werden kann, finden Sie unter Optimierung eines PID-Reglers zugunsten der Referenzverfolgung oder zugunsten der Störgrößenkompensation (PID Tuner).
Tipp
Um nach dem Verstellen der Schieberegler zum ersten Reglerentwurf zurückzukehren, klicken Sie auf  Reset Design.
Reset Design.