12.639 Ergebnisse
A framework which will teach basics of robotics such as Kinematics and Trajectory planning both by s
This work has been aimed at studying the kinematics of the Rhino Xr-3 robot and teaching the beginners in robotics to achieve specific tasks in real-time using the same. Previous work done

This toolbox provides useful functions for creating and manipulating dual quaternions.
What are dual quaternions?Dual quaternions are a convenient way of describing rigid body transformations (specifically unit dual quaternions, which are the focus of this toolbox). They carry the same

MAVLink communication support for Simulink

This package contains files necessary to build mobile robot that can travel along road and corridors
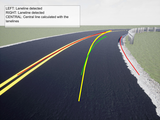
Hardware.https://www.youtube.com/watch?v=42we9W22iCM1. Мodel HighLevel_RaspberryPi simulate the vision system that allows a mobile robot to travel along straight road sections and corridors on the basis of linear perspective point detect. Camera Board
Model-based Autonomous Traffic Simulation Framework to develop automated driving algorithms and test them in an urban traffic environment.
MathWorks products and toolboxes:MATLAB®Simulink®Automated Driving Toolbox™Control System Toolbox™Deep Learning Toolbox™Model Predictive Control Toolbox™Robotics System Toolbox™Simulink 3D Animation™ (only

Function to Convert between DCM, Euler angles, Quaternions, and Euler vectors
Version 1.11.0.0
John FullerFunction to convert rotation data between 4 types: DCM, Euler Angles, Quaternions, and Euler Param.
Multi-DOF robot manipulator designer and simulator
model the kinematics and dynamics of robot manipulators. A complete description of the procedure to model and control a Multi-DOF 3D robot manipulator is detailed and simulated using designed toolbox
Jacobian and Velocity Kinematics of Robotic Manipulators in MATLAB
This project explains how to get Jacobian using Robotics System Toolbox and use it to get end-effector velocities using Joint velocities

MATLAB and Simulink files to program the drawing robot, webcam controlled rover, and self-balancing motorcycle projects from AEK Rev 2.
engineering concepts along the way in areas such as controls, system modeling, image processing, and robotics.Learn more about the Arduino Engineering Kit at: www.mathworks.com/arduino-kitImportant note:1. You
3D Space Coordinate Transformations
3d-coordinate-transformations3D Space Coordinate Transformations for Robotics ApplicationsThis folder contains 3 files (m-functions) :t2x.m Transformation Matrix to Generalized Position Vector.x2t.m

A population based optimization increases pointing precision for a planar robotic arm.
main file is PSO_Function_ArmijoRobot_3.m, and an example published result is included. In addition, PointCluster2Angles_HP5_3.m takes an standard trajectory and then computes the optimized trajectory
This script solves the Laplace's equation on the unit box using the FMM.
Computes the Forward kinematics of the RA-01 Robotic arm made by Images SI, Inc.
This function finds the forward kinematics of the RA-01 Robotic Arm made by Images SI, Inc., New York. The RA-01 has five degrees of freedom. This function outputs two vectors. The first vector is
quaternion class, vectorized, converts among rotation representations, numerical Euler propagation

Vehicle Path Tracking Using Pure Pursuit Controller
Version 1.1.1
MathWorks Student Competitions TeamThis submission contains a set of models to show the implementation of a pure pursuit controller on a vehicle under different scenarios.
A Java-based function to control mouse programmatically
(without HG handle support). If your program does not use the HG handle (i.e., H=0), consider using INPUTEMU instead. ----The function utilizes the java.Robot class to control mouse.Single-Command

GUI demonstration of different representations of 3-D rotations
This GUI application is mainly intended as a simple, user-friendly interface for the 3-D orientation maths of the robotics toolbox found here

Monocular Depth Estimation for indoor environment with MATLAB
datasetDependenciesMATLABDeep Learning ToolboxComputer Vision ToolboxSimulinkRobotics System ToolboxAutomated Driving ToolboxPackageGazeboPlugin (from Gazebo Simulation Environment Requirements and Limitations )DeviceUbuntu

MATLAB and Simulink examples for trajectory generation and evaluation of robot manipulators.
repository:https://github.com/Kinovarobotics/ros_kortexFor more information on the Robotics System Toolbox functionality for manipulators, see the documentation: https://www.mathworks.com/help/robotics/index.htmlFor more background information on trajectory

Learn how to control a basic Robotic System using a Desktop Computer, a Kinect and an Arduino.
Three examples are provided, showing how to use MATLAB and Simulink to control the robotic system. Each method has its advantages and disadvantages. The first example uses MATLAB to manage the
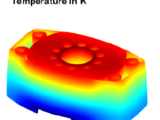
Heat conduction in a magnesium robotics component with finite element analysis (FEA).
This finite element thermal analysis (FEA) examines the heat tolerance for a robotics component. A single domain heat conduction analysis is performed on the nearest robotic component to the heat

Six-wheeled electrically-driven rover that navigates uneven terrain to retrieve a sample.
FluidsSimscape MultibodyRobotics System ToolboxThe rover chassis and arm uses files provided by NASA and shall be used according to NASA Media Usage Guidelines.
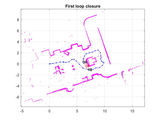
Develop a map of an environment and localize the pose of a robot for autonomous navigation.
Develop a map of an environment and localize the pose of a robot or a self-driving car for autonomous navigation using Robotics System Toolbox™.The robot needs to be driven manually when it obtains

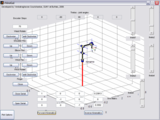
Simulate a three link planar robot.
The purpose of this program is to simulate a three link planar robot located in the robots lab at Walla Walla College. This robot demo simulates kinematics, inverse kinematics and real-time

this code draws 16 robot that the user select. the original drawings were made using ProE.
this code draws 16 robot that the user select. the original drawings were made using ProE. matlab converts it to faces and parts and assemble the robot. the user write robotics in matlab and the

www.SG-Lib.org - Toolbox for the Design & Creation of Solid Body Geometries, Mechanisms and Robot for 3D-Printing (STL) and Multi Body Simul
from Sep 2025 for 2024b) is an extremely comprehensive and powerful Matlab toolbox with several thousand functions for CAD design based on surface models in STL format. It has been continuously developed

GUI for analysis of manipulability, workspace and path tracking of a 3-PRR manipulator
simulation inputs.Webpage: https://sites.google.com/site/priyanshuagarwalsite/academic-research/robotics

Using robotic toolbox by Peter Croke and Color Detection concept
Using robotic toolbox by Peter Croke and Color Detection concepthttps://www.youtube.com/watch?v=HkSRUEZZhFI

Planners and logic for offroad navigation of an autonomous haul truck in an open pit mine. Built for MATLAB R2023b.
Toolbox™](https://www.mathworks.com/products/automated-driving.html)- [Stateflow®](https://www.mathworks.com/products/stateflow.html)- [Robotics System Toolbox™](https://www.mathworks.com/products/robotics.html) (Optional)- [Simulink 3D

Closed form Inverse Kinematics alghoritm based on swivel (or elbow) formulation for the Kinova Jaco2 7 d.o.f. (degrees of freedom)
loads the Kinova Jaco2 manipulator as a rigidbodytree object and plot it in a graph. To successfully run the LoadJaco2 function, please install the Robotic System Toolbox add-on from Mathworks.Install the

Control the Scorbot ER-U4 robot from Matlab
This toolbox lets you control the Scorbot ER-U4 robot from Matlab via a USB connection. This is the beta version. Please contact me with comments and bug reports. The included PDF file's Appendix
Generating trajectory from 1 point to another point with minimal jerk.
topic:Amirabdollahian, F., Loureiro, R., & Harwin, W. S. (2002). Minimum jerk trajectory control for rehabilitation and haptic applications. In Proceedings of IEEE International Conference on Robotics and Automation

Model of EV3 segway robot with LQR controller. Could be run on hardware (EV3)
- Build self-balancing Lego robot Gyroboy from scratch- Practice in control system design- Learn how the Model-Based Design works- Control Gyroboy from App Designer app or from Android- Have fun!HOW

animate single or multi-unit cars (or tractor / trucks - trailer)
This toolbox provides several functions and *.m-files to animate single or multi-unit car (or tractor / trucks - trailer) combinations with given trajectories of their center of gravity

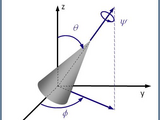
Eular angles visualization and connection with axis-angle rotation.

Create cross sections along waypoints based on a 3D grid interpolated from xyz scatter data.
Easily control the iRobot Create 2 from a PC using Matlab
I am pleased to announce the release of the MATLAB Toolbox for the iRobot Create 2 (MTIC2) - beta version.WHAT IS THE CREATE 2? The Create 2 is a re-programmable version of iRobot's Roomba 650
Entry for Simulink Challenge 2020. Includes a Simulink Model which runs a self-driving car with a single front camera in Unreal Engine.
Analyzes the kinematics of a 3-DOF robot.
Analyzes the kinematics of a 3 DOF robot, performing in the plane r.input = link lengthsoutput = feasability and path graph

The demo files for "Robotic Vision Solutions with MATLAB" Japanese Webinar
This zip file includes the demo files for the Japanese webinar "Robotic Vision Solutions with MATLAB". redBallDetection/imageProcessingWithMATLAB.m: Basic image processing with

A toolbox for industrial robot manipulator
Integrate a 1-DOF system using Newmark's Direct Integration Method.
Integrate a 1-DOF system using Newmark's Direct Integration Method. Calculate the system response for an externally applied load and variable system parameters. Even let's you change the integration
MatLab GUI to controling a 5R symetrical parallel mechanism
Project video (Youtube):https://youtu.be/Xbq9lMkz1VgGUI:- PanelRobot.fig. MatLab GUI to controling a 5R symetrical parallel mechanism. There is a bug wich prevents to open the GUI directly. It is
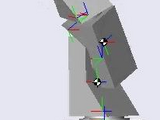
4 DOF arm imported via SimMechanics generates dynamics for optimal pick-place control solved by DIDO
A 4 DOF arm based on the Motoman IA20 was built in AutoDesk Inventor. SimMechanics is used to generate a Simulink model. This model generates the dynamics for the robot implicitly, so there is no

ROS Toolbox Support Package for TurtleBot-Based Robots
MathWorks Robotics and Autonomous Systems TeamDrive your TurtleBot and acquire sensor data.
ROS Toolbox Support Package for TurtleBot® Based Robots allows you to interface with one or more TurtleBots from MATLAB®. You can get sensor readings and control the robot’s motion. The same MATLAB
File consist of GUI based application for 4DOF robot
Robot displays work volume, having flexibility of screen rotation, specification of degree of freedom, shows x y z coordinates of end point of robot arm etc.If you like it or want to comment any
implementation of Quasi Linerization Algorithm

Applies value iteration to learn a policy for a robot in a grid world.
Applies value iteration to learn a policy for a Markov Decision Process (MDP) -- a robot in a grid world.The world is freespaces (0) or obstacles (1). Each turn the robot can move in 8 directions, or

Easy to use inverse kinematic GUI of fully configurable simulated 2-joint robot arm.
This Toolbox was created during a project work in the 6. Semester at Frankfurt University of Applied Sciences for Robotics and Autonomous Systems. Due to Syntax changes in R2020b, this version works
2 Dimension simulation of Inverse Kinematics 3DOF using Pseudo Inverse Jacobian
Movement system used forward kinematics denavit hartenberg which each joint angle is updated by joint velocity found by inverse kinematics pseudoinverse jacobian. Paper: link1 : Robot Manipulator
Code to the ACM paper titled "Inducing Human-like Motion in Robots"
The paper's objective is to reduce dynamic rigidity and real time computation in robotic systems. Dynamic rigidity has been a key issue in the field of robotic motion. Most methodologies in this

MATLAB simulator for a 4-link robot, teaching basic robotic principles
Kinematic simulator of a 4-link robot, demonstrating:- Hard-coded walking of the robot.- Inverse kinematic control.- Kalman filtering through interaction with a physical robot via Arduino- Q-Learning
Kinematic equations of Delta Robot
Here you can find Forward kinematic and Inverse kinematic of robot type Delta. Please pay attention to how to find parameters 'f' and 'e' in pictures that are attached.
User interface in Matlab to simulate a robot navigating a grid of barriers using the grassfire method.
Visualizes both the full grid and the robot's updated knowledge of the grid for each step. Also allows direct addition and deletion of barriers with the mouse and the option to save grid setups.To

Control a Raspberry Pi powered robot with MATLAB and Simulink
Version 1.1.0.0
MathWorks Simulink TeamControl a Raspberry Pi powered robot with MATLAB and Simulink
tracking. The default target is a green rectangle of 75x75mm.Once the target is identified, use Simulink to deploy a control system to the robot such that it can autonomously drive to the
DH parameters
given code takes the number of robot's arms as well as other parameters such as alpha,a,theta and d which can be either symbol or a value.output is:homogeneous transformation matricesDH parameters

NXT SCARA Model-Based Design based on Embedded Coder Robot NXT.
NXT SCARA is a two-link planar robot arm built with LEGO Mindstorms NXT. SCARA stands for Selective Compliant Assembly Robot Arm. Please refer the following URL to know more detailed information

Two functions to create smooth trajectories with boundary conditions.

MATLAB and Simulink tutorials for learning how to program and develop robots powered by ROS™
MATLAB® and Simulink® ROS™ Tutorials This is a set of interactive online tutorials teaching the basics of using ROS (Robot Operating System) to develop and program robots. Open these tutorials in

Simulation of trains suspension system
This model simulates linearized model of train suspension system considering primary and secondry suspension.
Sie können auch eine Website aus der folgenden Liste auswählen:
Amerika
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom(English)
Asien-Pazifik
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)