Control Algorithm Design
Create the torque-control and speed-control subsystems, verify the target execution time, and tune the control gains.
Categories
- Vector Control
Design motor control algorithms using vector control techniques like Field-Oriented Control (FOC) and Direct Torque Control (DTC)
- Six-Step Commutation
Design motor control algorithms using six-step commutation technique
- Open-Loop Control
Design motor control algorithms using open-loop control
- Gain Calculation and Tuning
Calculate PI controller gains for applying vector control
- Nonlinear Characterization
Design motor control algorithms that use nonlinear characteristics based on real-world conditions
Featured Examples

Generate Motor Control Models for Selected Algorithm and Hardware
Use Motor Control Blockset™ to generate a Simulink® model that is configured for a specific hardware and motor control technique.
Algorithm-Export Workflows for Custom Hardware
Enables you to use any custom motor-control hardware (hardware not used in the Motor Control Blockset™ examples) to run a three-phase permanent magnet synchronous motor (PMSM) using field-oriented control (FOC). Using the algorithm export workflows, which involve generating code for the control algorithm by using Simulink® and Embedded Coder® and then integrating it with either manually written or externally generated hardware driver code. This example explains the algorithm export workflows along with the intermediate steps.

Swap Motors with Single Deployment of Sensorless FOC Algorithm
Run a permanent magnet synchronous motor (PMSM) in an industrial drive application setup using a sensorless field-oriented control (FOC) algorithm. The example uses a sensorless Flux Observer to estimate the motor position. Industrial drives enable you to replace a motor with a new one without repeated deployment of code. An industrial drive setup needs only nameplate parameters to adapt the software to the new motor.

AUTOSAR-Based FOC of PMSM
Implement an AUTOSAR-based field-oriented control (FOC) algorithm to run a permanent magnet synchronous motor (PMSM).

Field-Oriented Control of PMSM Using Position Estimated by Neural Network
Implement field-oriented control (FOC) of a permanent magnet synchronous motor (PMSM) using a rotor position estimated by an autoregressive neural network (ARNN) trained with Deep Learning Toolbox™.
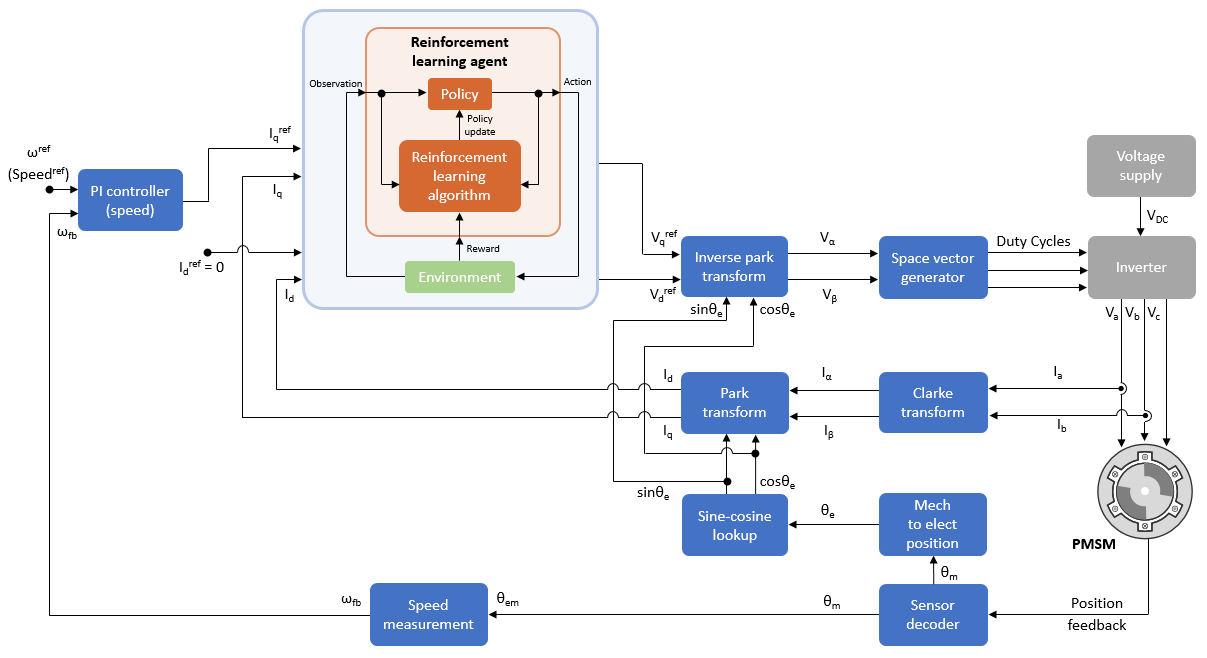
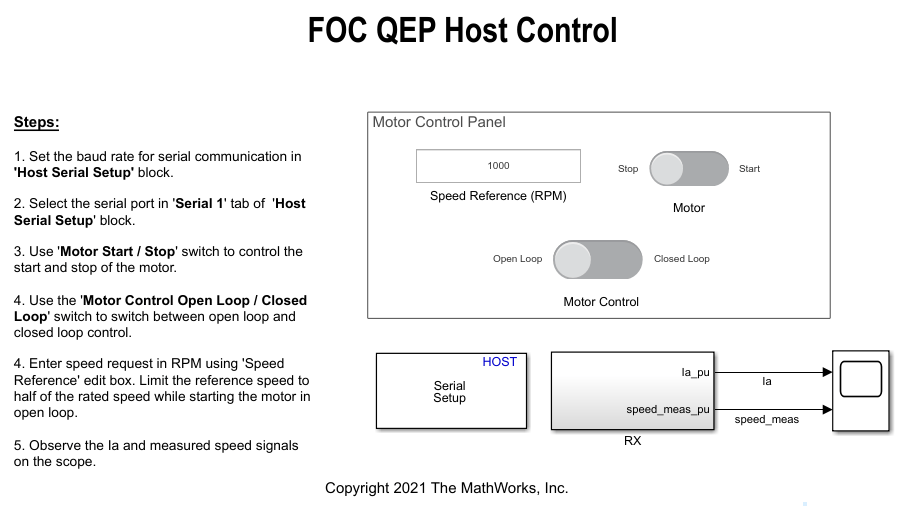
Field-Oriented Control of PMSM Using Reinforcement Learning
Use the control design method of reinforcement learning to implement field-oriented control (FOC) of a permanent magnet synchronous motor (PMSM). The example uses FOC principles. However, it uses the reinforcement learning (RL) agent instead of the PI controllers. For more details about FOC, see Field-Oriented Control (FOC).
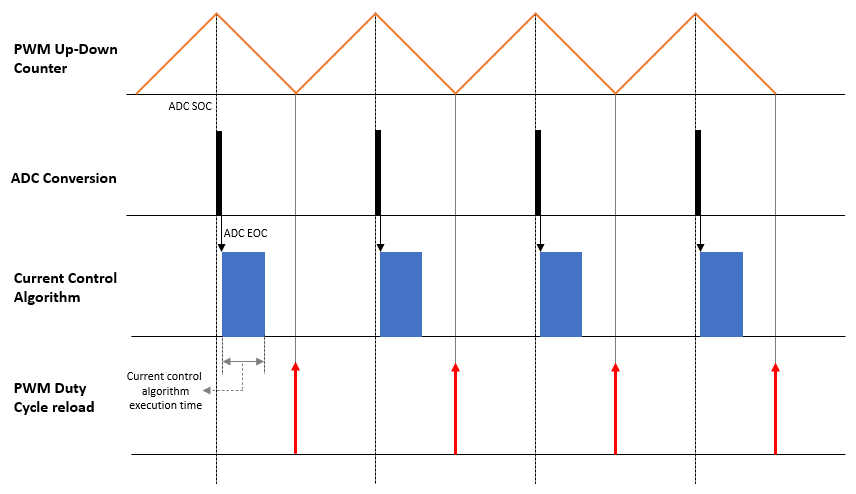
Motor Control Architectures Based on Different Current Sampling and PWM Frequencies
Enables you to implement different motor control architectures that use non-identical sampling rates for ADC conversion, PWM, and current controller algorithm to run a permanent magnet synchronous motor (PMSM) using field-oriented control (FOC).
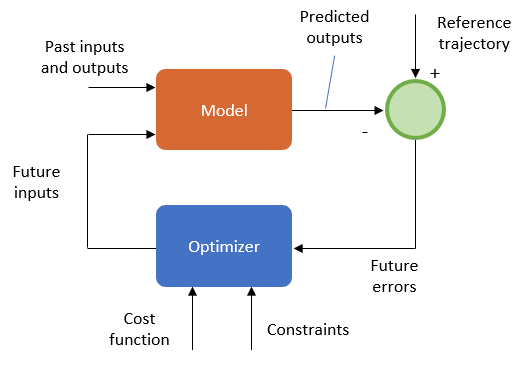
Run Field Oriented Control of PMSM Using Model Predictive Control
Uses Model Predictive Control (MPC) to control the speed of a three-phase permanent magnet synchronous motor (PMSM).
Field-Oriented Control of PMSM Using Reinforcement Learning
Use the control design method of reinforcement learning to implement field-oriented control (FOC) of a permanent magnet synchronous motor (PMSM). The example uses FOC principles. However, it uses the reinforcement learning (RL) agent instead of the PI controllers. For more details about FOC, see Field-Oriented Control (FOC).
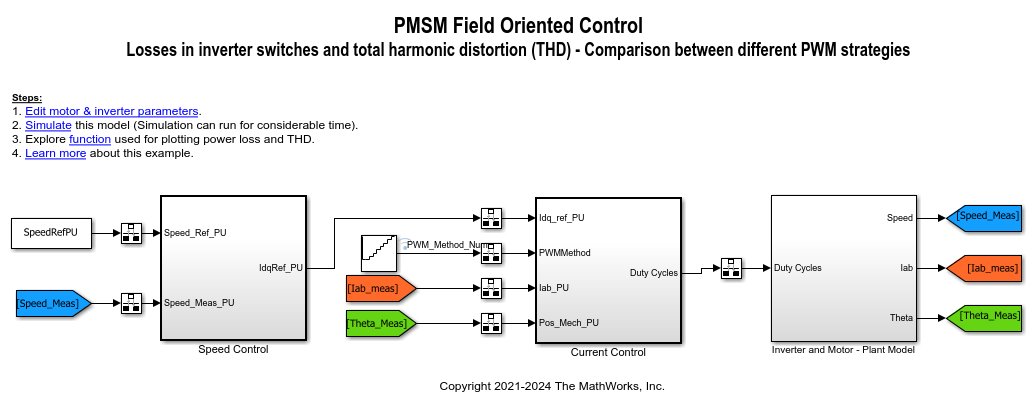
Determine Power Losses and THD for PWM Methods
Calculates the inverter power loss and total harmonic distortion (THD) in motor current for different pulse-width modulation (PWM) methods. The example uses field-oriented control (FOC) algorithm that runs a permanent-magnet synchronous motor (PMSM) in speed control mode as a reference. The example only supports simulation.
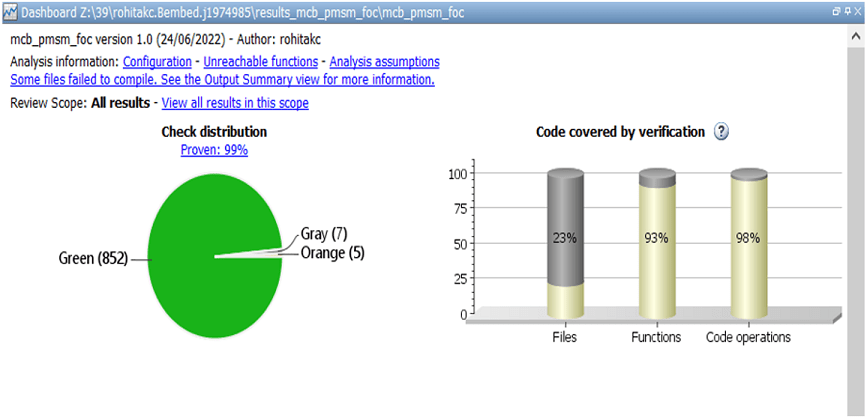
Analyze and Verify Motor Control Algorithms Using Polyspace
Uses the Polyspace® static code analysis tools to analyze and verify Simulink® models containing motor control algorithms. Static code analysis is a software verification technique that analyzes source code for quality, reliability, and security without executing the code. This approach uses robust error detection routines (that include checks for critical run-time errors) to identify bugs and defects and in addition ensures compliance with common coding standards. It provides a cost-effective alternative to measure and track the software quality metrics and eliminates the need to instrument the code or to write elaborate unit test cases.