Get Started with Motor Control Blockset
Motor Control Blockset™ provides Simulink® blocks and reference examples for developing and deploying motor control algorithms as optimized C and HDL code on target microcontrollers, FPGAs, or systems-on-chip (SoC). Build motor control algorithms with Clarke and Park transform, Maximum Torque Per Ampere (MTPA), six-step commutation, and lookup table (LUT)-based field weakening control blocks. You can process signals from encoders, hall sensors, and resolvers with sensor decoder blocks or implement sensorless control with estimator blocks to compute rotor position and speed. The blocks generate code that you can use in workflows involving MISRA C™ and ISO® 26262 functional safety standards.
Reference examples included in Motor Control Blockset help you understand how to develop, tune, and validate motor control algorithms using desktop and real-time simulation. Examples include algorithms for closed-loop motor control for induction motors, switched reluctance motors (SRM), synchronous motors like brushless DC motors (BLDC), and surface-mount and interior permanent magnet synchronous motors (PMSM). You can reuse the same algorithms to generate production-ready, compact, and traceable fixed- or floating-point code. You can also use the reference examples to implement algorithms for motor control hardware kits supported by the blockset.
Tutorials
- Create and Validate Model for Motor Control System
Create, deploy, and validate control algorithm for motor control system.
- Estimate Motor Parameters Using Motor Control Blockset Parameter Estimation Tool
Estimate motor parameters by using parameter estimation feature in Motor Control Blockset.
- Program Control Flow of Motor Control Blockset Examples
Design control flow of field-oriented control algorithm.
- How to Use Hall Validity and Hall Speed and Position Blocks
Integrate Hall Validity and Hall Decoder blocks with field-oriented control (FOC) algorithm.
- How to Use Field Oriented Control Autotuner Block
Use the Field Oriented Control Autotuner block to tune PI control loops in field-oriented control applications.
- How to Tune Sensorless Position Estimators
Tune sensorless position estimators for accurate position and speed measurements.
- Hardware Connections
Connect motors, sensors, and power supply to hardware boards.
- Model Configuration Parameters
Configure Simulink model to interface with supported target hardware.
About Motor Control
- Open-Loop and Closed-Loop Motor Control Techniques
Describes open-loop, closed-loop motor control, and transition from open-loop to closed-loop control. - Field-Oriented Control
Implement speed control for PMSM and induction motor by using field-oriented control. - Field-Weakening Control
Implement control for speeds above base speed for PMSM and induction motor by using field-weakening control. - Six-Step Commutation
Implement speed control for BLDC motor by using six-step commutation. - Direct Torque Control (DTC)
Implement speed control for PMSM by controlling motor flux and torque. - Host-Target Communication
Describes host model, target model, and how they communicate. - Current Sensor ADC Offset and Position Sensor Calibration
Describes offsets for Hall sensor, quadrature encoder, and current sensor ADC. - Per-Unit System
Defines a normalized unit system by using the base values.
Motor Control Algorithms
Implementation, Calibration, and Debugging Techniques for Embedded Systems
Featured Examples
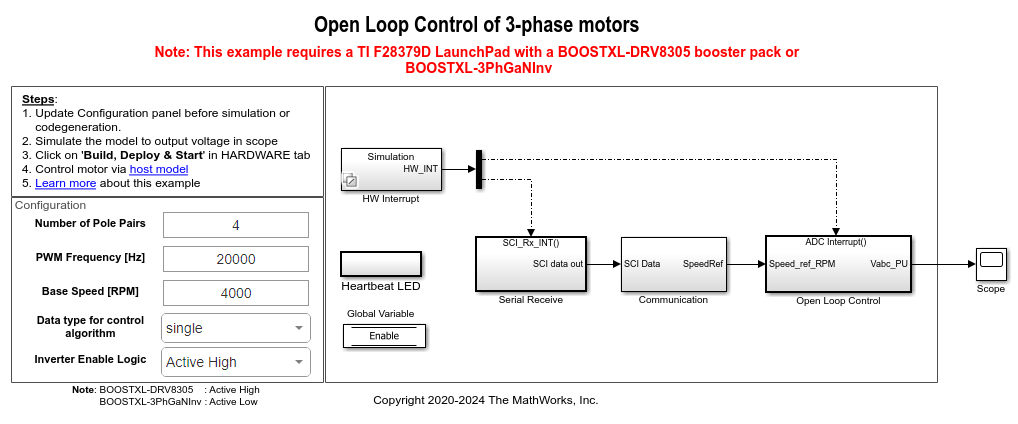
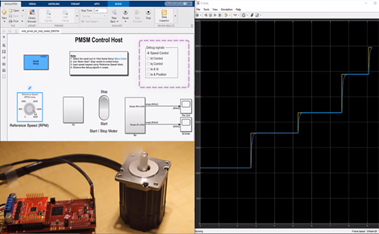
Run 3-Phase AC Motors in Open-Loop Control and Calibrate ADC Offset
Uses open-loop control (also known as scalar control or Volts/Hz control) to run a motor. This technique varies the stator voltage and frequency to control the rotor speed without using any feedback from the motor. You can use this technique to check the integrity of the hardware connections. A constant speed application of open-loop control uses a fixed-frequency motor power supply. An adjustable speed application of open-loop control needs a variable-frequency power supply to control the rotor speed. To ensure a constant stator magnetic flux, keep the supply voltage amplitude proportional to its frequency.

Field-Oriented Control of Induction Motor Using Speed Sensor
Implements the field-oriented control (FOC) technique to control the speed of a three-phase AC induction motor (ACIM). The FOC algorithm requires rotor speed feedback, which is obtained in this example by using a quadrature encoder sensor. For details about FOC, see Field-Oriented Control.

Field-Oriented Control of PMSM Using Hall Sensor
Implements the field-oriented control (FOC) technique to control the speed of a three-phase permanent magnet synchronous motor (PMSM). The FOC algorithm requires rotor position feedback, which is obtained by a Hall sensor. For details about FOC, see Field-Oriented Control.

Field-Oriented Control of PMSM Using SI Units
Implements the Field-Oriented Control (FOC) technique to control the speed of a three-phase Permanent Magnet Synchronous Motor (PMSM). However, instead of the per-unit representation of quantities (for details about the per-unit system, see Per-Unit System), the FOC algorithm in this example uses the SI units of signals to perform the computations. These are the signals and their SI units:

Tune PI Controllers Using Field Oriented Control Autotuner
Computes the gain values of PI controllers available in the speed and current control loops by using the Field Oriented Control Autotuner block. For details about this block, see Field Oriented Control Autotuner. For details about field-oriented control, see Field-Oriented Control.

Position Control of PMSM Using Quadrature Encoder
Implements the field-oriented control (FOC) technique to control the position of a three-phase permanent magnet synchronous motor (PMSM). The FOC algorithm requires rotor position feedback, which it obtains from a quadrature encoder sensor.

Code Verification and Profiling Using PIL Testing
Explains PIL profiling on Texas Instruments® LAUNCHXL-F28379D hardware board. In processor-in-the-loop (PIL) simulation, the control algorithm executes in the target hardware, but the plant model runs on the host machine. The plant model simulates the input and output signals for the controller and communicates with the controller by using the serial communication interface. This functionality allows you to use PIL simulation to determine the execution time on the target hardware, which you can then compare with the execution time for simulating the model on the host machine.
Interactive Learning

Introduction to Motor Control
Self-paced, interactive course available as part of Online
Training Suite subscription
Videos
Motor Control Blockset Overview
Learn about Motor Control Blockset capabilities