Linear System Identification | System Identification, Part 2
From the series: System Identification
Brian Douglas, MathWorks
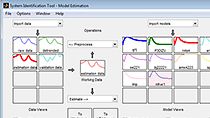
Learn how to use system identification to fit and validate a linear model to data that has been corrupted by noise and external disturbances
Noise and disturbances can make it difficult to determine if the error between an identified model and the real data comes from incorrectly modeled essential dynamics, data influenced by a random disturbance process, or some combination of the two. Discover how to account for the random disturbances by fitting a first-order autoregressive moving average (ARMA1) model to the disturbance path. This can give you a better overall system model fit and confidence that the essential dynamics were captured correctly.
Published: 10 Nov 2021