detect
Syntax
Description
Add-On Required: This feature requires the Automated Visual Inspection Library for Computer Vision Toolbox add-on.
detectionResults = detect(detector,ds)read function of
the input datastore ds, as a table.
[___] = detect(___,
detects objects within the rectangular search region roi)roi,
in addition to any combination of arguments from previous syntaxes.
[___] = detect(___,
specifies options using one or more name-value arguments, in addition to any
combination of arguments from previous syntaxes.. For example,
Name=Value)Threshold=0.25 specifies a detection threshold of
0.25.
Examples
Specify the name of a pretrained YOLOX deep learning network.
name = "tiny-coco";Create YOLOX object detector by using the pretrained YOLOX network.
detector = yoloxObjectDetector(name);
Detect objects in a test image by using the pretrained YOLOX object detector.
img = imread("tima.png");
[bboxes,scores,labels] = detect(detector,img,Threshold=0.6)bboxes = 1×4 single row vector
185.1392 255.8597 119.6875 217.3187
scores = single
0.7775
labels = categorical
cat
Display the detection results.
detectedImg = insertObjectAnnotation(img,"Rectangle",bboxes,labels);
figure
imshow(detectedImg)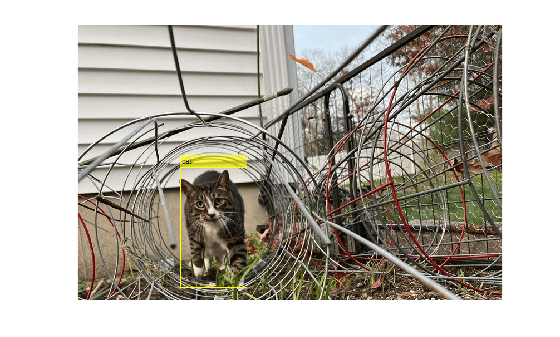
Load a pretrained YOLOX object detector.
detector = yoloxObjectDetector("small-coco");Specify the location of test data, then create an image datastore that reads the test data.
location = fullfile(matlabroot,"toolbox","vision","visiondata","vehicles"); imds = imageDatastore(location);
Detect objects in the datastore. Set the Threshold name-value argument to 0.4 and MiniBatchSize name-value argument to 32.
detectionResults = detect(detector,imds,Threshold=0.4,MiniBatchSize=32);
Read an image from the test data set and extract the corresponding detection results.
num = 20;
I = readimage(imds,num);
bboxes = detectionResults.Boxes{num};
labels = detectionResults.Labels{num};
scores = detectionResults.Scores{num}scores = 5×1 single column vector
0.6125
0.7789
0.7595
0.6787
0.4322
Perform non-maximal suppression to select strongest bounding boxes from the overlapping clusters. Set the OverlapThreshold name-value argument to 0.5.
[bboxes,scores,labels] = selectStrongestBboxMulticlass(bboxes, ...
scores,labels,OverlapThreshold=0.5);Display the detection results.
results = table(bboxes,labels,scores)
results=5×3 table
2.0755 69.2511 16.8517 9.0757 car 0.6125
19.2191 70.2047 21.2572 10.8475 car 0.7789
75.1651 65.7733 25.7689 23.2266 car 0.7595
96.4793 54.2146 16.1751 24.6539 bus 0.6787
1 104.9146 225.5654 22.6630 car 0.4322
detectedImg = insertObjectAnnotation(I,"Rectangle",bboxes,labels);
figure
imshow(detectedImg)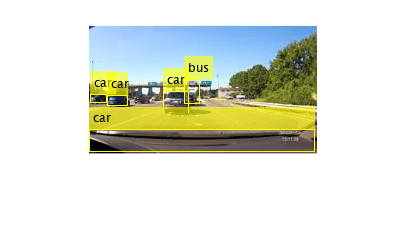
Load a pretrained YOLOX object detector.
detector = yoloxObjectDetector("small-coco");Read a test image.
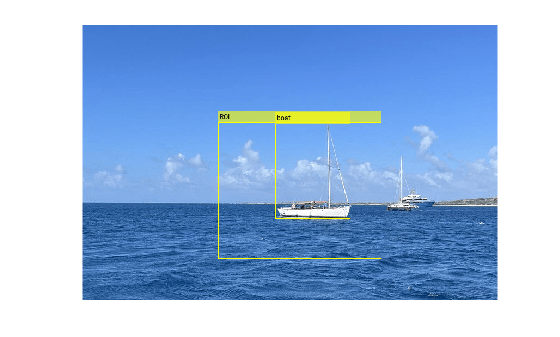
img = imread("aruba.png");Specify a region of interest (ROI) within the test image.
roiBox = [250 180 300 250];
Detect objects within the specified ROI.
[bboxes,scores,labels] = detect(detector,img,roiBox,Threshold=0.55);
Display the ROI and the detection results.
img = insertObjectAnnotation(img,"Rectangle",roiBox,"ROI",AnnotationColor="yellow"); detectedImg = insertObjectAnnotation(img,"Rectangle",bboxes,labels); figure imshow(detectedImg)