Objekterkennung
Die Objekterkennung ist eine Computer-Vision-Technik zum Auffinden von Instanzen von Objekten in Bildern oder Videos. Objekterkennungsalgorithmen verwenden oft Machine Learning oder Deep Learning, um sinnvolle Ergebnisse zu erzielen. Wenn Menschen Bilder oder Videos betrachten, können sie innerhalb kürzester Zeit relevante Objekte erkennen und finden. Das Ziel der Objekterkennung besteht darin, diese Intelligenz mit einem Computer nachzubilden. Der beste Ansatz zur Objekterkennung hängt von der Anwendung und dem zu lösenden Problem ab.
Deep-Learning-Techniken benötigen eine große Anzahl gekennzeichneter Trainingsbilder. Daher wird empfohlen, eine GPU zu verwenden, um die für das Training eines Modells benötigte Zeit zu reduzieren. Deep-Learning-Ansätze für die Objekterkennung verwenden Convolutional Neural Networks (CNNs oder ConvNets) wie R-CNN und YOLO oder nutzen Single-Shot Detection (SSD). Sie können einen benutzerdefinierten Objektdetektor trainieren oder einen vortrainierten Objektdetektor verwenden, indem Sie Transfer Learning nutzen, ein Ansatz, bei dem Sie ein vortrainiertes Netzwerk auf Ihre Anwendung abstimmen. Convolutional Neural Networks benötigen die Deep Learning Toolbox™. Training und Prognose werden von CUDA®-kompatiblen CDUs unterstützt. Die Verwendung einer GPU wird empfohlen; hierfür wird die Parallel Computing Toolbox™ benötigt. Weitere Informationen finden Sie unter Einstellungen der Computer Vision Toolbox und Parallel Computing Support in MathWorks Products (Parallel Computing Toolbox).
Machine-Learning-Techniken für die Objekterkennung umfassen Aggregate Channel Features (ACF), Support Vector Machines (SVM), Klassifizierung mittels Histograms of Oriented Gradient-Merkmalen (HOG) und den Viola-Jones-Algorithmus zur Erkennung menschlicher Gesichter oder Oberkörper. Sie können mit einem vortrainierten Objektdetektor beginnen oder einen benutzerdefinierten Objektdetektor für Ihre Anwendung erstellen.

Apps
| Image Labeler | Label images for computer vision applications |
| Video Labeler | Label video for computer vision applications |
Funktionen
Blöcke
| Deep Learning Object Detector | Detect objects using trained deep learning object detector (Seit R2021b) |
Themen
Erste Schritte
- Get Started with Object Detection Using Deep Learning
Perform object detection using deep learning neural networks such as YOLOX, YOLO v4, RTMDet, and SSD. - Choose an Object Detector
Compare object detection deep learning models, such as YOLOX, YOLO v4, RTMDet, and SSD. - Local Feature Detection and Extraction
Learn the benefits and applications of local feature detection and extraction. - Get Started with Cascade Object Detector
Train a custom classifier. - Point Feature Types
Choose functions that return and accept points objects for several types of features. - Getting Started with OCR
Detect and recognize text in multiple languages, train OCR models to recognize custom text. - Image Classification with Bag of Visual Words
Use the Computer Vision Toolbox™ functions for image category classification by creating a bag of visual words. - Koordinatensysteme
Angabe von Pixel-Indizes, räumlichen Koordinaten und 3D-Koordinatensystemen
Trainingsdaten für Objekterkennung und Instance Segmentation
- Get Started with the Image Labeler
Interactively label rectangular ROIs for object detection, pixels for semantic segmentation, polygons for instance segmentation, and scenes for image classification. - Get Started with the Video Labeler
Interactively label rectangular ROIs for object detection, pixels for semantic segmentation, polygons for instance segmentation, and scenes for image classification in a video or image sequence. - Datastores for Deep Learning (Deep Learning Toolbox)
Learn how to use datastores in deep learning applications. - Training Data for Object Detection and Semantic Segmentation
Create training data for object detection or semantic segmentation using the Image Labeler or Video Labeler. - Get Started with Image Preprocessing and Augmentation for Deep Learning
Preprocess data for deep learning applications with deterministic operations such as resizing, or augment training data with randomized operations such as random cropping.
Erste Schritte mit Deep Learning
- Deep Learning in MATLAB (Deep Learning Toolbox)
Discover deep learning capabilities in MATLAB® using convolutional neural networks for classification and regression, including pretrained networks and transfer learning, and training on GPUs, CPUs, clusters, and clouds. - Pretrained Deep Neural Networks (Deep Learning Toolbox)
Learn how to download and use pretrained convolutional neural networks for classification, transfer learning and feature extraction.
Enthaltene Beispiele

Object Detection in Large Satellite Imagery Using Deep Learning
Perform object detection on large satellite imagery using deep learning.

Object Detection Using YOLO v4 Deep Learning
Detect objects in images using you only look once version 4 (YOLO v4) deep learning network. In this example, you will

Perform 6-DoF Pose Estimation for Bin Picking Using Deep Learning
Perform six degrees-of-freedom (6-DoF) pose estimation by estimating the 3-D position and orientation of machine parts in a bin using RGB-D images and a deep learning network.

Multiclass Object Detection Using YOLO v2 Deep Learning
Train a YOLO v2 multiclass object detector and evaluate object detector performance across selected classes and overlap thresholds.
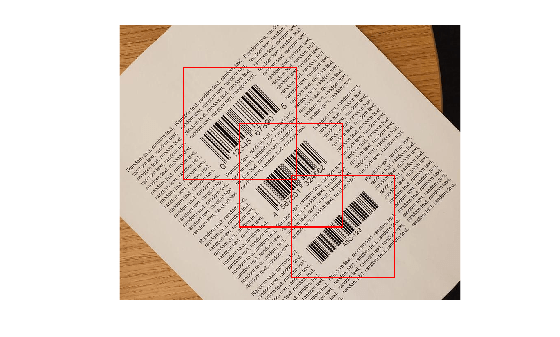
Read Barcodes in Image
Detect, decode, and localize 1-D and 2-D barcodes in an image.

Train Object Detectors in Experiment Manager
Use the Experiment Manager app to find optimal training options for object detectors.

Find Object in Cluttered Scene Using Image Point Features
Detect a particular object in a cluttered scene, given a reference image of the object.

Detect Cars Using Gaussian Mixture Models
Detect and count cars in a video sequence using foreground detector based on Gaussian mixture models (GMMs).
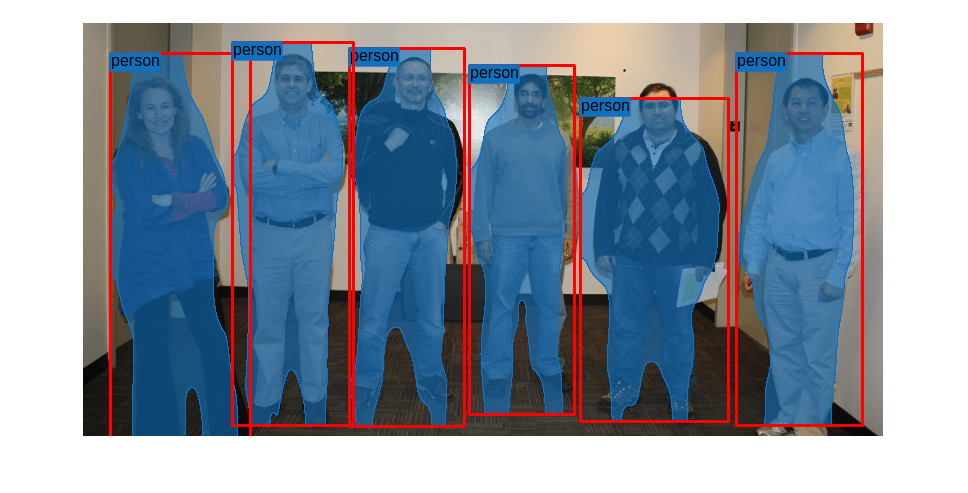
Perform Instance Segmentation Using Mask R-CNN
Segment individual instances of people and cars using a multiclass mask region-based convolutional neural network (R-CNN).

Import Pretrained ONNX YOLO v2 Object Detector
Import pretrained YOLO v2 object detector from ONNX deep learning framework.
Export YOLO v2 Object Detector to ONNX
Export pretrained YOLO v2 object detector to ONNX deep learning framework.

Code Generation for Object Detection by Using YOLO v2
Generate CUDA® code for object detection using YOLO v2.

Code Generation for Object Detection by Using Single Shot Multibox Detector
Generate CUDA code for an SSD network.