Instanzensegmentierung
Die Instance Segmentation ist eine Computer-Vision-Technik, die eine wichtige Rolle bei Aufgaben spielt, bei denen Objekte präzise lokalisiert und einzelne Objektinstanzen identifiziert werden müssen, wie beispielsweise bei der medizinischen Bildgebung und dem autonomen Fahren. Durch Kombination der Prinzipien der Objekterkennung und semantischen Segmentierung kann die Instance Segmentation visuelle Daten präziser aufschlüsseln, indem einzelne Objektinstanzen identifiziert und ihre Ränder Pixel um Pixel eingezeichnet werden. Mit Instance Segmentation können Sie einzelne Objekte in einem Bild präzise identifizieren, klassifizieren und trennen.
Sie können Inferenz an einem Bild mit einem vortrainierten Deep-Learning-Netzwerks ausführen oder ein Netzwerk mit Transfer Learning trainieren. Transfer Learning ist ein Ansatz, bei dem Sie mit einem vortrainierten Netzwerk beginnen und dieses mit einem benutzerdefinierten Datensatz für Ihre Anwendung trainieren. Sie können Ground-Truth-Daten für das Training interaktiv generieren, indem Sie die Apps Image Labeler, Video Labeler oder Ground Truth Labeler (Automated Driving Toolbox) zur Kennzeichnung von Pixeln und zum Export der Kennzeichnungsdaten verwenden. Instance Segmentation benötigt Deep Learning Toolbox™. Training und Inferenz unterstützt CUDA®-kompatible Grafikkarten. Die Verwendung einer GPU wird empfohlen; hierfür wird die Parallel Computing Toolbox™ benötigt. Weitere Informationen finden Sie unter Parallel Computing Support in MathWorks Products (Parallel Computing Toolbox).

Funktionen
Themen
Erste Schritte
- Get Started with Instance Segmentation Using Deep Learning
Segment objects using an instance segmentation model such as SOLOv2 or Mask R-CNN. - Get Started with SOLOv2 for Instance Segmentation
Perform multiclass instance segmentation using SOLOv2 and deep learning. - Getting Started with Mask R-CNN for Instance Segmentation
Perform multiclass instance segmentation using Mask R-CNN and deep learning.
Trainingsdaten für Instance Segmentation
- Get Started with Image Preprocessing and Augmentation for Deep Learning
Preprocess data for deep learning applications with deterministic operations such as resizing, or augment training data with randomized operations such as random cropping. - Datastores for Deep Learning (Deep Learning Toolbox)
Learn how to use datastores in deep learning applications.
Enthaltene Beispiele

Perform Instance Segmentation Using SOLOv2
Segment object instances of randomly rotated machine parts in a bin using a deep learning SOLOv2 network.
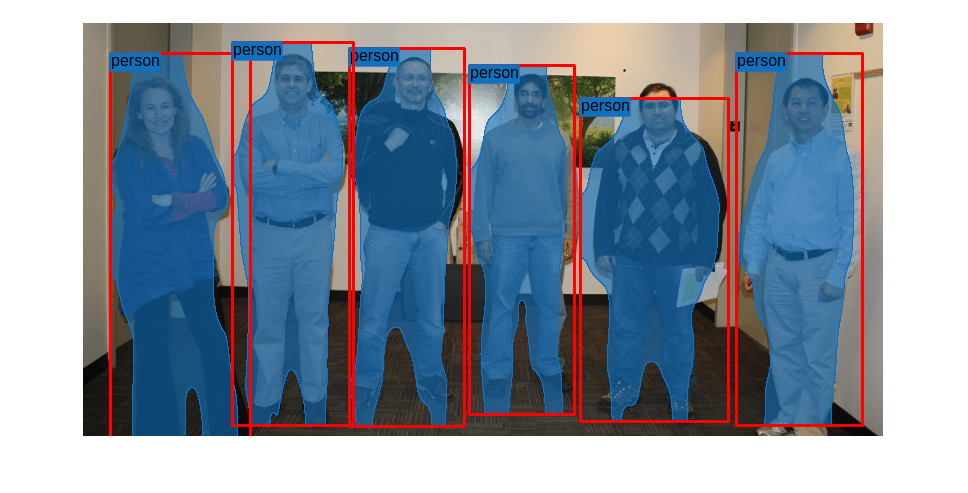
Perform Instance Segmentation Using Mask R-CNN
Segment individual instances of people and cars using a multiclass mask region-based convolutional neural network (R-CNN).

Perform 6-DoF Pose Estimation for Bin Picking Using Deep Learning
Perform six degrees-of-freedom (6-DoF) pose estimation by estimating the 3-D position and orientation of machine parts in a bin using RGB-D images and a deep learning network.