isminphase
Verify that discrete-time filter System object is minimum phase
Syntax
Description
flag = isminphase(___,Arithmetic=arithType)arithType input
using either of the previous syntaxes.
For more input options, see isminphase in Signal Processing Toolbox™.
Examples
Design a Chebyshev Type I IIR filter and determine if the filter has minimum phase and is stable.
Using the fdesign.lowpass and design functions, design a Chebyshev Type I IIR filter with a passband ripple of 0.5 dB and a 3 dB cutoff frequency at 9600 Hz.
Fs = 48000; % Sampling frequency of input signal d = fdesign.lowpass('N,F3dB,Ap', 10, 9600, .5, Fs); filt = design(d,'cheby1',Systemobject=true)
filt =
dsp.SOSFilter with properties:
Structure: 'Direct form II'
CoefficientSource: 'Property'
Numerator: [5×3 double]
Denominator: [5×3 double]
HasScaleValues: true
ScaleValues: [0.3318 0.2750 0.1876 0.0904 0.0225 0.9441]
Show all properties
Using the isminphase function, determine if the filter has minimum phase.
isminphase(filt)
ans = logical
1
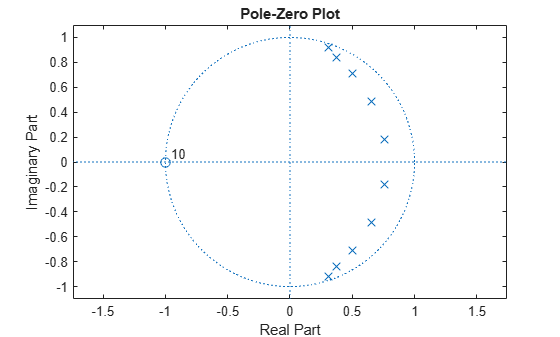
Verify the location of poles and zeros of the filter transfer function on the z-plane. By definition, the poles and zeros of the minimum phase filter must be on or inside the unit circle.
zplane(filt)
All minimum phase filters are stable. To verify if the designed filter is stable, use the isstable function.
isstable(filt)
ans = logical
1