dsp.FIRDecimator
Perform polyphase FIR decimation
Description
The dsp.FIRDecimator
System object™ performs an efficient polyphase decimation using an integer downsampling factor
M along the first dimension.
Conceptually, the FIR decimator (as shown in the schematic) consists of an anti-aliasing FIR filter followed by a downsampler.
The FIR filter filters the data in each channel of the input using a direct-form FIR
filter. The FIR filter coefficients can be specified through the
Numerator property, or can be automatically designed by the object
using the designMultirateFIR function. The
designMultirateFIR function designs an anti-aliasing FIR filter. The
downsampler that follows the FIR filter downsamples each channel of filtered data by taking
every M-th sample and discarding the M – 1 samples that follow. M is the value of the decimation
factor that you specify. The resulting discrete-time signal has a sample rate that is
1/M times the original sample rate.
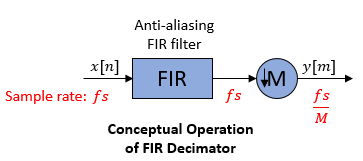
Note that the actual object algorithm implements a direct-form FIR polyphase structure, an efficient equivalent of the combined system depicted in the diagram. For more details, see Algorithms.
To resample vector or matrix inputs along the first dimension:
Create the
dsp.FIRDecimatorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
This object supports C/C++ code generation and SIMD code generation under certain conditions. For more information, see Code Generation.
Creation
Syntax
Description
firdecim = dsp.FIRDecimatordesignMultirateFIR(1,2) function.
firdecim = dsp.FIRDecimator(M)DecimationFactor
property set to M. The object designs its filter coefficients based
on the decimation factor M that you specify while creating the
object, using the designMultirateFIR(1,M) function. The designed
filter corresponds to a lowpass with a cutoff at π/M in radial
frequency units.
firdecim = dsp.FIRDecimator(M,"Auto")NumeratorSource
property set to "Auto". In this mode, every time
there is an update in the decimation factor, the object redesigns the
filter using designMultirateFIR(1,M).
firdecim = dsp.FIRDecimator(M,num)DecimationFactor property set to
M and the Numerator
property set to num.
firdecim = dsp.FIRDecimator(___,InputSampleRate=Value)"normalized". (since R2026a)
To specify an input sample rate of 22050 Hz, set
InputSampleRate to 22050. To specify the input sample rate in
normalized units, set InputSampleRate to
"normalized". (since R2026a)
firdecim = dsp.FIRDecimator(___,PropertyName=Value)DecimationFactor to 4.
firdecim = dsp.FIRDecimator(M,"legacy")fir1(35,0.4). The designed filter has a
cutoff frequency of 0.4π radians/sample.
Properties
Usage
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Decimate a sum of sine waves by a factor of 2 and by a factor of 4.
Start with a cosine wave that has an angular frequency of radians/sample.
x = cos(pi/4*(0:95)');
Design Default Filter
Create a dsp.FIRDecimator object. To prevent aliasing, the object uses an anti-aliasing lowpass filter before downsampling. By default, the anti-aliasing lowpass filter is designed using the designMultirateFIR function. The function designs the filter based on the decimation factor that you specify, and stores the coefficients in the Numerator property. For a decimation factor of 2, the object designs the coefficients using designMultirateFIR(1,2).
firdecim = dsp.FIRDecimator(2)
firdecim =
dsp.FIRDecimator with properties:
Main
DecimationFactor: 2
NumeratorSource: 'Property'
Numerator: [0 -1.0054e-04 0 3.8704e-04 0 -0.0010 0 0.0022 0 -0.0043 0 0.0077 0 -0.0128 0 0.0207 0 -0.0331 0 0.0542 0 -0.1002 0 0.3163 0.5000 0.3163 0 -0.1002 0 0.0542 0 -0.0331 0 0.0207 0 -0.0128 0 0.0077 0 -0.0043 0 0.0022 0 … ] (1×48 double)
Structure: 'Direct form'
Show all properties
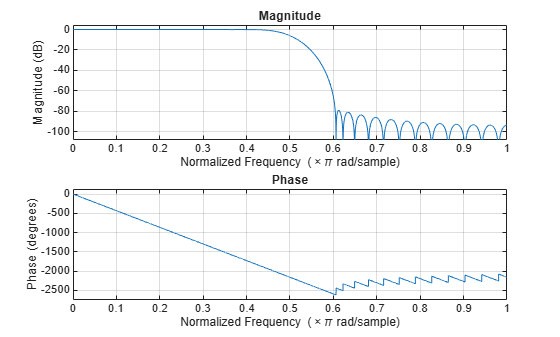
Visualize the filter response. The designed filter meets the ideal filter constraints that are marked in red. The cutoff frequency is approximately half the spectrum.
freqz(firdecim)
Decimate by 2
Decimate the cosine signal by a factor of 2.
y = firdecim(x);
Plot the original and the decimated signals. In order to plot the two signals on the same plot, you must account for the output delay of the FIR decimator and the scaling introduced by the filter. Use the outputDelay function to compute the delay value introduced by the decimator. Shift the output by this delay value.
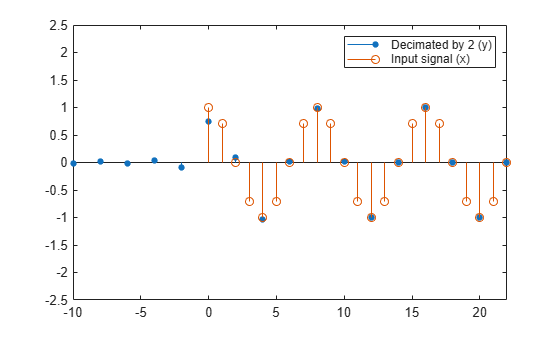
Visualize the input and the resampled signals. After a short transition, the output converges to a cosine of frequency as expected, which is twice the frequency of the input signal . Due to the decimation factor of 2, the output samples coincide with every other input sample.
[delay,FsOut] = outputDelay(firdecim); nx = (0:length(x)-1); ty = (0:length(y)-1)/FsOut-delay; stem(ty,y,"filled",MarkerSize=4); hold on; stem(nx,x); hold off; xlim([-10,22]) ylim([-2.5 2.5]) legend("Decimated by 2 (y)","Input signal (x)");
Add a High Frequency Component to Input and Decimate
Add another frequency component to the input signal, a sine with an angular frequency of radians/sample. Since is above the FIR lowpass cutoff, , the frequency radians/sample is filtered out from the signal.
xhigh = x + 0.2*sin(2*pi/3*(0:95)'); release(firdecim) yhigh = firdecim(xhigh);
Plot the input signal, decimated signal, and the output of the low frequency component. The decimated signal yhigh has the high frequency component filtered out. yhigh is almost identical to the output of the low frequency component y.
stem(ty,yhigh,"filled",MarkerSize=4); hold on; stem(nx,xhigh); stem(ty,y,":m",MarkerSize=7); hold off; xlim([-10,22]) ylim([-2.5 2.5]) legend("Decimated by 2 (yhigh)",... "Input signal with the high tone added (xhigh)",... "Decimated by 2 - low tone only (y)");

Decimate by 4 in Automatic Filter Design Mode
Now decimate by a factor of 4. In order for the filter design to be updated automatically based on the new decimation factor, set the NumeratorSource property to "Auto". Alternately, you can pass "Auto" as the keyword while creating the object. The object then operates in the automatic filter design mode. Every time there is a change in the decimation factor, the object updates the filter design.
release(firdecim)
firdecim.NumeratorSource = "Auto";
firdecim.DecimationFactor = 4firdecim =
dsp.FIRDecimator with properties:
Main
DecimationFactor: 4
NumeratorSource: 'Auto'
Structure: 'Direct form'
Show all properties
To access the filter coefficients in the automatic mode, type firdecim.Numerator in the MATLAB command prompt.
The designed filter occupies a narrower passband that is approximately a quarter of the spectrum.
freqz(firdecim)

Decimate the cosine signal by a factor of 4. After a short transition, the output converges to a cosine of frequency as expected, which is four times the lower frequency component of the input signal . This time, the amplitude of the output is half the amplitude of the input since the gain of the FIR at is exactly . The high frequency component diminishes by the lowpass FIR whose cutoff frequency is .
yAuto = firdecim(xhigh);
Plot the input signal with the high frequency component added, low frequency component scaled by 1/2, and the decimated signal. Recalculate the output delay and the output sample rate since the decimation factor has changed.
[delay,FsOut] = outputDelay(firdecim); tyAuto = (0:length(yAuto)-1)/FsOut-delay; stem(tyAuto,yAuto,"filled",MarkerSize=4); hold on; stem(nx,xhigh); stem(nx,x/2,"m:",MarkerSize=7); hold off; xlim([-20,36]) ylim([-2.5 2.5]) legend("Decimated by 4 (yAuto)",... "Input signal with the high frequency component added (xhigh)",... "Low tone input scaled by 1/2");

Reduce the sample rate of an audio signal by a factor of 2 and play the decimated signal using the audioDeviceWriter object.
Note: The audioDeviceWriter System object™ is not supported in MATLAB Online.
Create a dsp.AudioFileReader object. The default audio file read by the object has a sample rate of 22050 Hz.
afr = dsp.AudioFileReader(OutputDataType="single");Create a dsp.FIRDecimator object and specify the decimation factor to be 2. The object designs the filter using designMultirateFIR(1,2) and stores the coefficients in the Numerator property of the object.
firdecim = dsp.FIRDecimator(2)
firdecim =
dsp.FIRDecimator with properties:
Main
DecimationFactor: 2
NumeratorSource: 'Property'
Numerator: [0 -1.0054e-04 0 3.8704e-04 0 -0.0010 0 0.0022 0 -0.0043 0 0.0077 0 -0.0128 0 0.0207 0 -0.0331 0 0.0542 0 -0.1002 0 0.3163 0.5000 0.3163 0 -0.1002 0 0.0542 0 -0.0331 0 0.0207 0 -0.0128 0 0.0077 0 -0.0043 0 0.0022 0 … ] (1×48 double)
Structure: 'Direct form'
Show all properties
Create an audioDeviceWriter object. Specify the sample rate to be 22050/2.
adw = audioDeviceWriter(22050/2)
adw =
audioDeviceWriter with properties:
Device: 'Default'
SampleRate: 11025
Show all properties
Read the audio signal using the file reader object, decimate the signal by a factor of 2, and play the decimated signal.
while ~isDone(afr) frame = afr(); y = firdecim(frame); adw(y); end release(afr); pause(0.5); release(adw);
Since R2026a
Specify the input sample rate explicitly while constructing the dsp.FIRDecimator object using the InputSampleRate argument.
firDecim = dsp.FIRDecimator(InputSampleRate=22050)
firDecim =
dsp.FIRDecimator with properties:
Main
DecimationFactor: 2
NumeratorSource: 'Property'
Numerator: [0 -1.0054e-04 0 3.8704e-04 0 -0.0010 0 0.0022 0 -0.0043 0 0.0077 0 -0.0128 0 0.0207 0 -0.0331 0 0.0542 0 -0.1002 0 0.3163 0.5000 0.3163 0 -0.1002 0 0.0542 0 -0.0331 0 0.0207 0 -0.0128 0 0.0077 0 -0.0043 0 0.0022 0 … ] (1×48 double)
Structure: 'Direct form'
Show all properties
You can view this information using the Input sample rate field of the info function.
info(firDecim)
ans = 11×56 char array
'Discrete-Time FIR Multirate Filter (real) '
'----------------------------------------- '
'Filter Structure : Direct-Form FIR Polyphase Decimator'
'Decimation Factor : 2 '
'Polyphase Length : 24 '
'Filter Length : 48 '
'Stable : Yes '
'Linear Phase : Yes (Type 1) '
' '
'Arithmetic : double '
'Input sample rate : 22050 '
Visualize the frequency response of the filter using filterAnalyzer. Note the frequency range from 0 to 11025 Hz.
filterAnalyzer(firDecim,FilterNames="InputSampleRate22050Hz")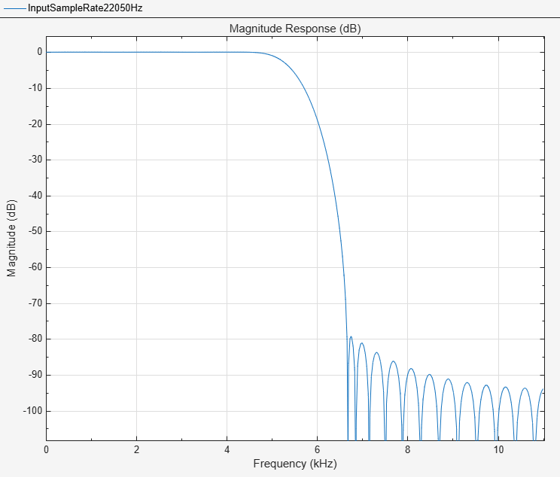
To specify the input sample rate after constructing the object, use the setInputSampleRate function.
setInputSampleRate(firDecim,44100)
To confirm, view the sample rate information using the info function.
info(firDecim)
ans = 11×56 char array
'Discrete-Time FIR Multirate Filter (real) '
'----------------------------------------- '
'Filter Structure : Direct-Form FIR Polyphase Decimator'
'Decimation Factor : 2 '
'Polyphase Length : 24 '
'Filter Length : 48 '
'Stable : Yes '
'Linear Phase : Yes (Type 1) '
' '
'Arithmetic : double '
'Input sample rate : 44100 '
Visualize the frequency response of the filter using filterAnalyzer. Note the change in frequency interval from 0 to 22050 Hz.
filterAnalyzer(firDecim,FilterNames="InputSampleRate44100Hz")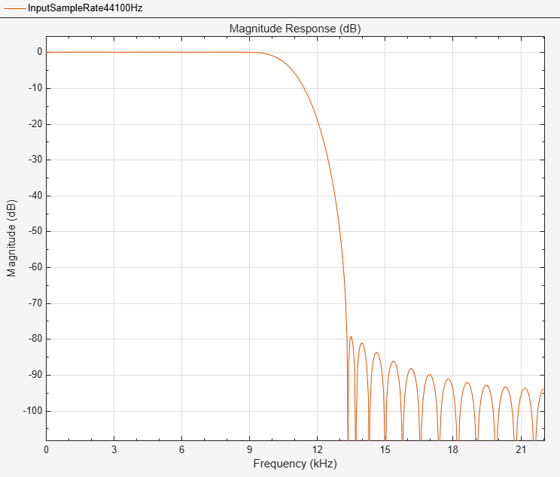
More About
Algorithms
The FIR decimation filter is implemented efficiently using a polyphase structure. For more details on polyphase filters, see Polyphase Subfilters.
To derive the polyphase structure, start with the transfer function of the FIR filter:
N+1 is the length of the FIR filter.
You can rearrange this equation as follows:
M is the number of polyphase components, and its value equals the decimation factor that you specify.
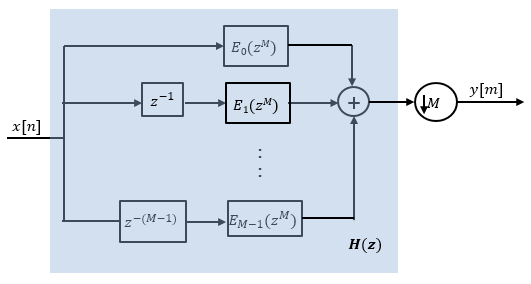
You can write this equation as:
E0(zM), E1(zM), ..., EM-1(zM) are the polyphase components of the FIR filter H(z).
Conceptually, the FIR decimation filter contains a lowpass FIR filter followed by a downsampler.

Replace H(z) with its polyphase representation.
Here is the multirate noble identity for decimation.

Applying the noble identity for decimation moves the downsampling operation to before the filtering operation. This move enables you to filter the signal at a lower rate.

You can replace the delays and the decimation factor at the input with a commutator switch. The switch starts on the first branch 0 and moves in the counterclockwise direction as shown in this diagram. The accumulator at the output receives the processed input samples from each branch of the polyphase structure and accumulates these processed samples until the switch goes to branch 0. When the switch goes to branch 0, the accumulator outputs the accumulated value.

When the first input sample is delivered, the switch feeds this input to the branch 0 and the decimator computes the first output value. As more input samples come in, the switch moves in the counter clockwise direction through branches M−1, M−2, and all the way up to branch 0, delivering one sample at a time to each branch. When the switch comes to branch 0, the decimator outputs the next set of output values. This process continues as data keeps coming in. Every time the switch comes to the branch 0, the decimator outputs y[m]. The decimator effectively outputs one sample for every M samples it receives. Hence the sample rate at the output of the FIR decimation filter is fs/M.
Extended Capabilities
Version History
Introduced in R2012aSee Also
Functions
freqz|freqzmr|filterAnalyzer|info|cost|polyphase|impz|coeffs|outputDelay|designRateConverter|setInputSampleRate