Motor Carrier
Sie können die Servo- oder Gleichstrommotoren M1 und M2 im geschlossenen Regelkreis über zwei Encoder-Eingänge auf dem MKR Motor Carrier oder Nano Motor Carrier steuern. Erstellen Sie ein arduino-Objekt, bevor Sie die Motor Carrier-Funktionen verwenden. Weitere Informationen dazu finden Sie unter Connect to Arduino Hardware.
Funktionen
Themen
- Using Arduino Engineering Kit Rev 2 with Pre-Configured Projects in Support Package
Learn how to use Arduino® Engineering Kit Rev 2 with the support package.
Verwandte Informationen
Enthaltene Beispiele

Webcam Controlled Rover Using Arduino Engineering Kit Rev 2
Use Arduino® Engineering Kit Rev 2 to program a differential drive robot that can be remotely controlled by MATLAB® over Wi-Fi® to perform operations such as path following and moving objects with a forklift along with obstacle avoidance.

Drawing Robot Using Arduino Engineering Kit Rev 2
Use Arduino® Engineering Kit Rev 2 to build and program a robot that extracts line traces from an image and reproduces it as a drawing on a whiteboard. The project uses MATLAB® code to capture an image using a webcam, and then convert it into a set of motor commands using image processing techniques, which drive the robot across a whiteboard and reproduce the captured image as a drawing.
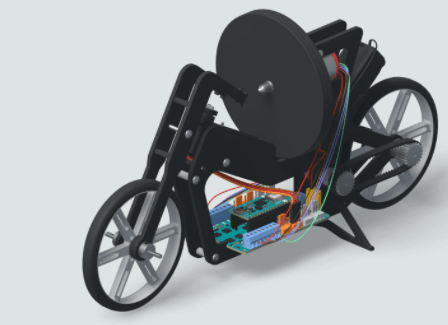
Self-Balancing Motorcycle Using Arduino Engineering Kit Rev 2
Use Arduino® Engineering Kit Rev 2 to build and program a motorcycle bot that self-balances and maneuvers by itself using a flywheel. The project models the motorcycle with the help of inverted pendulum dynamics and performs inertial sensing to balance the motorcycle by controlling the flywheel, located at the center of the motorcycle.