pzmap
Pol-Nullstellen-Diagramm eines dynamischen Systems
Syntax
Beschreibung
[ gibt die Systempole und Übertragungsnullstellen des dynamischen Systemmodells p,z] = pzmap(sys)sys an.
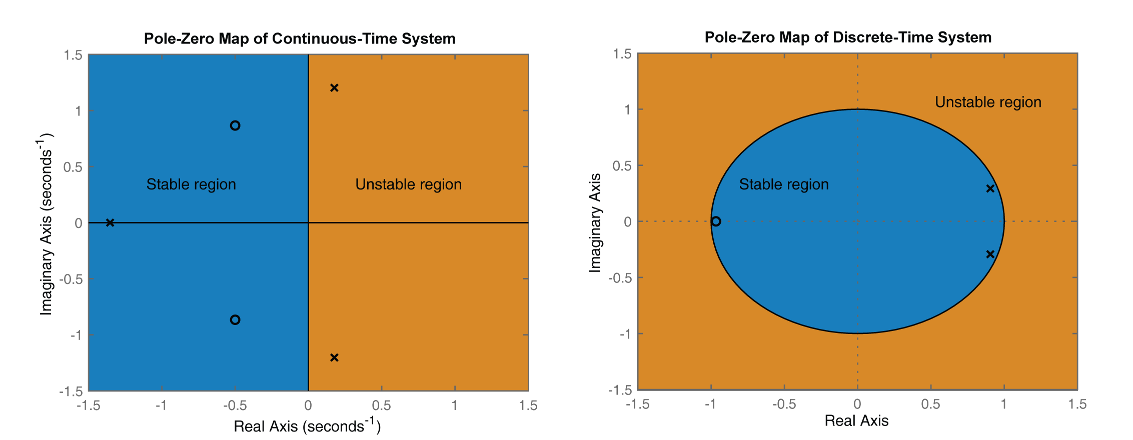
Die folgende Abbildung zeigt Pol-Nullstellen-Diagramme für ein zeitkontinuierliches (links) und zeitdiskretes (rechts) lineares zeitvariantes Modell.
Bei zeitkontinuierlichen Systemen müssen alle Pole auf der komplexen s-Ebene in der linken Halbebene (blauer Bereich) liegen, um die Stabilität zu gewährleisten. Das System ist marginal stabil, wenn verschiedene Pole auf der imaginären Achse liegen, d. h. die Realteile der Pole Null sind.
Bei zeitdiskreten Systemen müssen alle Pole in der komplexen z-Ebene innerhalb des Einheitskreises (blauer Bereich) liegen. Das System ist marginal stabil, wenn es einen oder mehrere Pole hat, die auf dem Einheitskreis liegen.
pzmap( plottet ein Pol-Nullstellen-Diagramm für sys)sys. Im Diagramm stellen x und o Pole bzw. Nullstellen dar. Bei SISO-Systemen plottet pzmap die Systempole und Nullstellen dar. Bei MIMO-Systemen plottet pzmap die Systempole und Übertragungsnullstellen.
Beispiele
Plotten Sie die Pole und Nullstellen des zeitkontinuierlichen Systems, das durch die folgende Transferfunktion dargestellt wird:
H = tf([2 5 1],[1 3 5]);
pzmap(H)
grid on
Wenn Sie das Gitter einschalten, werden Linien mit konstantem Dämpfungsverhältnis (zeta) und Linien mit konstanter Eigenfrequenz (wn) angezeigt. Dieses System hat zwei echte Nullstellen, die im Diagramm mit o gekennzeichnet sind. Das System hat auch ein Paar komplexer Pole, die mit x gekennzeichnet sind.
Plotten Sie das Pol-Nullstellen-Diagramm eines zeitdiskreten identifizierten Zustandsraum-(idss)-Modells. In der Praxis können Sie ein idss-Modell durch Schätzung auf der Grundlage von Eingang-Ausgang-Messungen eines Systems erhalten. Erstellen Sie es in diesem Beispiel aus Zustandsraumdaten.
A = [0.1 0; 0.2 -0.9];
B = [.1 ; 0.1];
C = [10 5];
D = [0];
sys = idss(A,B,C,D,'Ts',0.1);Untersuchen Sie das Pol-Nullstellen-Diagramm.
pzmap(sys)

Die Pole des Systems sind mit x gekennzeichnet, die Nullstellen mit o.
Laden Sie für dieses Beispiel ein 3-mal-1-Array von Transferfunktionsmodellen.
load("tfArray.mat","sys"); size(sys)
3x1 array of transfer functions. Each model has 1 outputs and 1 inputs.
Plotten Sie die Pole und Nullstellen jedes Modells im Array in unterschiedlichen Farben. Verwenden Sie in diesem Beispiel Rot für das erste Modell, Grün für das zweite und Blau für das dritte Modell im Array.
pzplot(sys(:,:,1),"r",sys(:,:,2),"g",sys(:,:,3),"b") grid

Das Gitter zeigt Linien mit konstantem Dämpfungsverhältnis und konstanter Eigenfrequenz in der s-Ebene des Pol-Nustellen-Diagramms.
Verwenden Sie pzmap, um die Pole und Nullstellen der folgenden Transferfunktion zu berechnen:
sys = tf([4.2,0.25,-0.004],[1,9.6,17]); [p,z] = pzmap(sys)
p = 2×1
-7.2576
-2.3424
z = 2×1
-0.0726
0.0131
In diesem Beispiel wird ein Gebäudemodell mit acht Stockwerken verwendet, von denen jedes drei Freiheitsgrade hat: zwei Verschiebungen und eine Drehung. Die E/A-Beziehung für jede dieser Verschiebungen wird als 48-Zustandsmodell dargestellt, wobei jeder Zustand eine Verschiebung oder deren Änderungsrate (Geschwindigkeit) darstellt.
Laden Sie das Gebäudemodell.
load('building.mat');
size(G)State-space model with 1 outputs, 1 inputs, and 48 states.
Plotten Sie die Pole und Nullstellen des Systems.
pzmap(G)

Aus dem Diagramm ist ersichtlich, dass es zahlreiche sich nahezu aufhebende Pol-Nullstellen-Paare gibt, die möglicherweise eliminiert werden könnten, um das Modell zu vereinfachen, ohne dass dies Auswirkungen auf die Gesamtantwort des Modells hätte. pzmap ist zur visuellen Identifizierung solcher sich fast aufhebenden Pol-Nullstellen-Paare zur Pol-Nullstellen-Vereinfachung nützlich.
Eingabeargumente
Ausgangsargumente
Tipps
Bei MIMO-Modellen zeigt
pzmapalle Systempole und Übertragungsnullstellen in einem einzigen Diagramm an. Verwenden Sieiopzmap, um Pole und Nullstellen für einzelne Eingangs-Ausgangs-Paare zuzuordnen.pzplotbietet Ihnen zusätzliche Optionen zur Anpassung des Erscheinungsbildes des Pol-Nullstellen-Diagramms.Diagramme, die mit
pzmaperstellt werden, unterstützen keine mehrzeiligen Titel oder Beschriftungen, die als String-Arrays oder Zellenarrays von Zeichenvektoren angegeben sind. Verwenden Sie zur Angabe mehrzeilige Titel und Beschriftungen eine einzelne Zeichenkette mit einemnewline-Zeichen.pzmap(sys,u,t) title("first line" + newline + "second line");