rlocus
Wurzelortskurve dynamischer Systeme
Beschreibung
rlocus( berechnet den Wurzelort des SISO-Modells sys)sys und stellt ihn in einem Diagramm dar. Der Wurzelort liefert die Polbahnen des geschlossenen Regelkreises in Abhängigkeit von der Feedback-Verstärkung k (unter der Annahme eines negativen Feedbacks). Die Wurzelorte werden verwendet, um die Auswirkungen unterschiedlicher Feedback-Verstärkungsfaktoren auf die Polstellen des geschlossenen Regelkreises zu untersuchen. Diese Orte wiederum liefern indirekte Informationen über das Zeitverhalten und die Frequenzgänge.
Sie können rlocus verwenden, um das Wurzelortsdiagramm einer der folgenden negativen Feedback-Schleifen darzustellen, indem Sie sys wie folgt festlegen:

Wenn sys beispielsweise eine Transferfunktion ist, die durch
dargestellt ist, sind die Polstellen eines geschlossenen Regelkreises die Wurzeln von
Die Wurzelortskurve zeigt die Trajektorien der Polstellen des geschlossenen Regelkreises, wenn die Feedback-Verstärkung k von 0 bis unendlich variiert. rlocus wählt adaptiv eine Reihe positiver Verstärkungsfaktoren k aus, um eine glatte Kurve zu erzeugen. Die Polstellen in der Wurzelortskurve werden mit x und die Nullstellen mit o bezeichnet.
rlocus(sys1,sys2,...) stellt die Wurzelorte mehrerer LTI-Modelle sys1, sys2,... in einem einzigen Diagramm dar. Sie können für jedes Modell eine Farbe, einen Linienstil und eine Marke festlegen. Weitere Informationen zu den Anpassungsmöglichkeiten von Diagrammen finden Sie unter rlocusplot.
Beispiele
Wurzelortskurve dynamischer Systeme
Für dieses Beispiel wird der Wurzelort des folgenden dynamischen SISO-Systems grafisch dargestellt:
sys = tf([2 5 1],[1 2 3]); rlocus(sys)
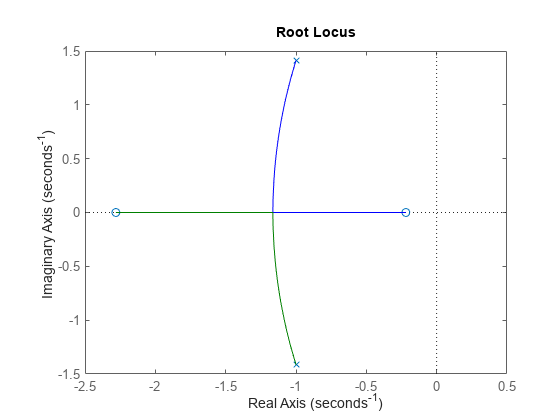
Die Polstellen des Systems werden in der Wurzelortskurve mit x und die Nullstellen mit o bezeichnet. Sie können das Menü in der generierten Wurzelortskurve verwenden, um Gitterlinien hinzuzufügen, einen Bereich zu vergrößern oder zu verkleinern und um den Eigenschaftseditor aufzurufen, um die Kurve anzupassen.
Weitere Informationen zu den Anpassungsmöglichkeiten von Diagrammen finden Sie unter rlocusplot.
Wurzelortskurve mehrerer dynamischer Systemmodelle
Betrachten Sie in diesem Beispiel sisoModels.mat, welches die folgenden drei SISO-Modelle enthält:
sys1ein Transferfunktionsmodellsys2ein Zustandsraummodellsys3ein Null-Polstellen-Verstärkungsmodell
Laden Sie die Modelle aus der mat-Datei.
load('sisoModels.mat','sys1','sys2','sys3');
Erstellen Sie die Wurzelortskurve mithilfe von rlocus und legen Sie die Farbe für jedes System fest. Fügen Sie auch eine Legende zur Wurzelortskurve hinzu.
rlocus(sys1,'b',sys2,'k',sys3,'r') hold on legend('sys1','sys2','sys3') hold off
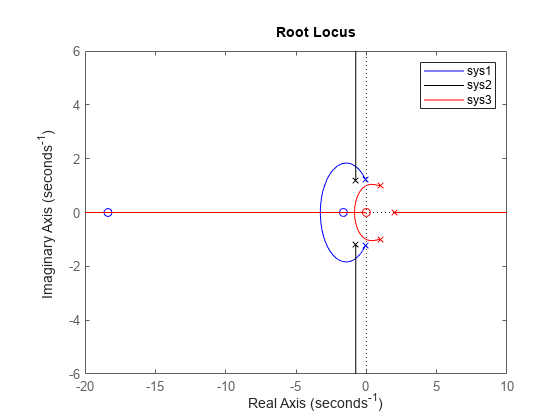
Die Abbildung enthält Wurzelortskurven für alle drei Systeme im gleichen Diagramm. Weitere Informationen zur Anpassung von Diagrammen finden Sie unter rlocusplot.
Polstellen des geschlossenen Regelkreises und Feedback-Verstärkungswerte mithilfe von Wurzelort
Betrachten Sie in diesem Beispiel das folgende SISO-Transferfunktionsmodell:
Verwenden Sie das oben genannte Transferfunktionsmodell mit rlocus, um die Polstellen des geschlossenen Regelkreises und die zugehörigen Feedback-Verstärkungswerte zu extrahieren.
sys = tf([3 0 1],[9 7 5 6]); [r,k] = rlocus(sys)
r = 3×53 complex
102 ×
-0.0094 + 0.0000i -0.0104 + 0.0000i -0.0105 + 0.0000i -0.0106 + 0.0000i -0.0107 + 0.0000i -0.0108 + 0.0000i -0.0109 + 0.0000i -0.0111 + 0.0000i -0.0112 + 0.0000i -0.0113 + 0.0000i -0.0115 + 0.0000i -0.0117 + 0.0000i -0.0119 + 0.0000i -0.0121 + 0.0000i -0.0124 + 0.0000i -0.0126 + 0.0000i -0.0129 + 0.0000i -0.0132 + 0.0000i -0.0135 + 0.0000i -0.0139 + 0.0000i -0.0143 + 0.0000i -0.0148 + 0.0000i -0.0152 + 0.0000i -0.0158 + 0.0000i -0.0163 + 0.0000i -0.0170 + 0.0000i -0.0177 + 0.0000i -0.0184 + 0.0000i -0.0192 + 0.0000i -0.0201 + 0.0000i -0.0211 + 0.0000i -0.0222 + 0.0000i -0.0233 + 0.0000i -0.0246 + 0.0000i -0.0259 + 0.0000i -0.0274 + 0.0000i -0.0290 + 0.0000i -0.0307 + 0.0000i -0.0326 + 0.0000i -0.0346 + 0.0000i -0.0368 + 0.0000i -0.0392 + 0.0000i -0.0418 + 0.0000i -0.0446 + 0.0000i -0.0476 + 0.0000i -0.0508 + 0.0000i -0.0543 + 0.0000i -0.0582 + 0.0000i -0.0623 + 0.0000i -0.0667 + 0.0000i
0.0008 + 0.0084i 0.0006 + 0.0083i 0.0006 + 0.0082i 0.0006 + 0.0082i 0.0006 + 0.0082i 0.0006 + 0.0082i 0.0005 + 0.0082i 0.0005 + 0.0082i 0.0005 + 0.0082i 0.0005 + 0.0081i 0.0005 + 0.0081i 0.0004 + 0.0081i 0.0004 + 0.0081i 0.0004 + 0.0080i 0.0004 + 0.0080i 0.0003 + 0.0080i 0.0003 + 0.0080i 0.0003 + 0.0079i 0.0002 + 0.0079i 0.0002 + 0.0078i 0.0002 + 0.0078i 0.0002 + 0.0078i 0.0001 + 0.0077i 0.0001 + 0.0077i 0.0001 + 0.0076i 0.0000 + 0.0076i 0.0000 + 0.0075i -0.0000 + 0.0074i -0.0000 + 0.0074i -0.0000 + 0.0073i -0.0001 + 0.0073i -0.0001 + 0.0072i -0.0001 + 0.0071i -0.0001 + 0.0071i -0.0001 + 0.0070i -0.0001 + 0.0070i -0.0001 + 0.0069i -0.0001 + 0.0068i -0.0001 + 0.0068i -0.0001 + 0.0067i -0.0001 + 0.0067i -0.0001 + 0.0066i -0.0001 + 0.0066i -0.0001 + 0.0065i -0.0001 + 0.0065i -0.0001 + 0.0064i -0.0001 + 0.0064i -0.0001 + 0.0064i -0.0001 + 0.0063i -0.0001 + 0.0063i
0.0008 - 0.0084i 0.0006 - 0.0083i 0.0006 - 0.0082i 0.0006 - 0.0082i 0.0006 - 0.0082i 0.0006 - 0.0082i 0.0005 - 0.0082i 0.0005 - 0.0082i 0.0005 - 0.0082i 0.0005 - 0.0081i 0.0005 - 0.0081i 0.0004 - 0.0081i 0.0004 - 0.0081i 0.0004 - 0.0080i 0.0004 - 0.0080i 0.0003 - 0.0080i 0.0003 - 0.0080i 0.0003 - 0.0079i 0.0002 - 0.0079i 0.0002 - 0.0078i 0.0002 - 0.0078i 0.0002 - 0.0078i 0.0001 - 0.0077i 0.0001 - 0.0077i 0.0001 - 0.0076i 0.0000 - 0.0076i 0.0000 - 0.0075i -0.0000 - 0.0074i -0.0000 - 0.0074i -0.0000 - 0.0073i -0.0001 - 0.0073i -0.0001 - 0.0072i -0.0001 - 0.0071i -0.0001 - 0.0071i -0.0001 - 0.0070i -0.0001 - 0.0070i -0.0001 - 0.0069i -0.0001 - 0.0068i -0.0001 - 0.0068i -0.0001 - 0.0067i -0.0001 - 0.0067i -0.0001 - 0.0066i -0.0001 - 0.0066i -0.0001 - 0.0065i -0.0001 - 0.0065i -0.0001 - 0.0064i -0.0001 - 0.0064i -0.0001 - 0.0064i -0.0001 - 0.0063i -0.0001 - 0.0063i
k = 1×53
0 0.4201 0.4542 0.4911 0.5309 0.5740 0.6205 0.6709 0.7253 0.7841 0.8477 0.9165 0.9908 1.0712 1.1581 1.2521 1.3536 1.4634 1.5822 1.7105 1.8493 1.9993 2.1614 2.3368 2.5263 2.7313 2.9529 3.1924 3.4514 3.7313 4.0340 4.3613 4.7151 5.0975 5.5111 5.9581 6.4415 6.9640 7.5289 8.1397 8.8000 9.5138 10.2856 11.1200 12.0220 12.9973 14.0516 15.1915 16.4238 17.7561
Da sys 3 Polstellen enthält, beträgt die Größe des resultierenden Arrays der Polstellen r 3x53. Jede Spalte in r entspricht einem Verstärkungswert aus dem Vektor k. Für dieses Beispiel wählte rlocus automatisch 53 Werte von k von Null bis Unendlich, um eine glatte Bahn für die drei Polstellen des geschlossenen Regelkreises zu erhalten.
display(r(:,39))
-3.2585 + 0.0000i -0.0145 + 0.6791i -0.0145 - 0.6791i
display(k(39))
7.5289
So enthält z. B. r(:,39) die oben genannten Polstellen des geschlossenen Regelkreises für einen Feedback-Verstärkungswert von 7.5289.
Position der Polstellen geschlossener Regelkreise für einen Satz von Feedback-Verstärkungswerten
Betrachten Sie in diesem Beispiel das folgende SISO-Transferfunktionsmodell:
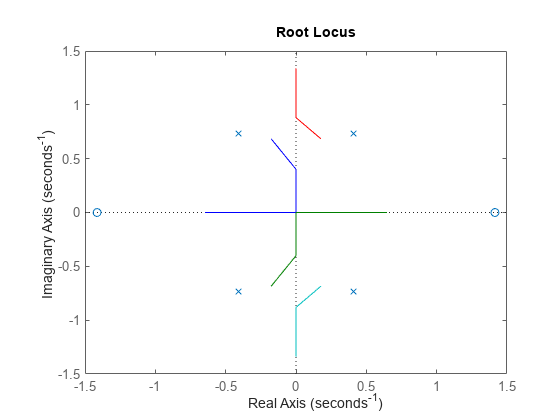
Definieren Sie das Transferfunktionsmodell und den erforderlichen Vektor der Feedback-Verstärkungswerte. Betrachten Sie für dieses Beispiel eine Reihe von Verstärkungswerten, die von 1 bis 8 mit Inkrementen von 0,5 variieren, und extrahieren Sie die Polstellen des geschlossenen Regelkreises mit rlocus.
sys = tf([0.5 0 -1],[4 0 3 0 2]); k = (1:0.5:5); r = rlocus(sys,k); size(r)
ans = 1×2
4 9
Da sys 4 Polstellen im geschlossenen Regelkreis enthält, beträgt die Größe des resultierenden Arrays der Positionen der geschlossenen Polstellen r 4x9, wobei die 9 Spalten den 9 spezifischen Verstärkungswerten entsprechen, die in k definiert sind.
Sie können den Bahnverlauf der Polstellen des geschlossenen Regelkreises für die spezifischen Verstärkungswerte in k auch auf der Wurzelortkurve visualisieren.
rlocus(sys,k)
Eingabeargumente
Ausgangsargumente
Tipps
Informationen zu einem interaktiven Ansatz für die Darstellung von Wurzelorten finden Sie unter Control System Designer.
Versionsverlauf
Eingeführt vor R2006a
Siehe auch
rlocusplot | tf | pole | zero | ss | zpk | Control System Designer
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)