"Modeling, Design, and Control of Robotic Mechanisms" Courseware

Course Materials Include:
- Syllabus
- 1 lecture
- 4 projects (with video clips)
Modeling, Design, and Control of Robotic Mechanisms
By Han Sung Kim
Mechanical Engineering
Kyungnam University
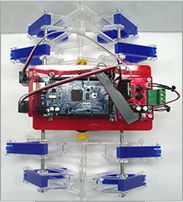
This project shows how to make analytical and CAD models of robotic mechanisms (for example, industrial robots, walking robots, etc.), to design robotic mechanisms and position controller based on the models, to fabricate the robotic mechanisms and the embedded real-time controller by using xPC Target, and to conduct control experiments on a prototype robot system.
Learning Outcomes
- Ability to make MATLAB programs for kinematic and dynamic analysis of planar robots.
- Ability to make dynamic models of planar robots using Simscape Multibody.
- Ability to make control programs for planar robots using Simulink and xPC Target.
- Ability to utilize Simulink and Arduino board for mechatronics and robotics projects.
Download free courseware for Modeling, Design, and Control of Robotic Mechanisms from Kyungnam University.

This work is licensed under a Creative Commons Attribution-ShareAlike 3.0 Unported License.