Erstellen eines Architekturmodells mit Schnittstellen und Anforderungsverknüpfungen
In diesem Abschnitt erfahren Sie, wie Sie mit System Composer™ ein Architekturmodell eines Roboterarms erstellen, Schnittstellen an Ports definieren und Anforderungsverknüpfungen zu Komponenten hinzufügen.
Sie lernen Folgendes:
Starten Sie System Composer.
Hinzufügen von Architekturkomponenten zur Darstellung von Sensoren, Bahnplanung und Bewegung für Roboterarme.
Erstellen von Ports und Verbindungen zur Darstellung des Datenaustauschs.
Definieren von Datenschnittstellen zur Darstellung der Datenstruktur.
Verwalten von Anforderungsverknüpfungen, um Verbindungen zu Anforderungen aus Modellelementen darzustellen.
Für das Verknüpfen, Verfolgen und Verwalten von Anforderungen in System Composer ist eine Requirements Toolbox™-Lizenz erforderlich.
Weitere Informationen zum Model-Based Systems Engineering Workflow in System Composer finden Sie unter Entwerfen und Analyse von Systemen mithilfe von Architekturmodellen.
Visuelle Darstellung des Systems
Die Umsetzung eines Architekturentwurfs beginnt mit der visuellen Darstellung des Systems anhand von Komponenten und deren Verbindungen. Erstellen Sie ein Architekturmodell, stellen Sie die Systemkomponenten dar und zeichnen Sie die Verbindungen zwischen ihnen ein.
Erstellen eines Architekturmodells
Geben Sie diesen Befehl in das MATLAB®-Befehlsfenster ein.
systemcomposer
Die Simulink®-Startseite wird mit System Composer geöffnet.
Klicken Sie auf Architecture Model.
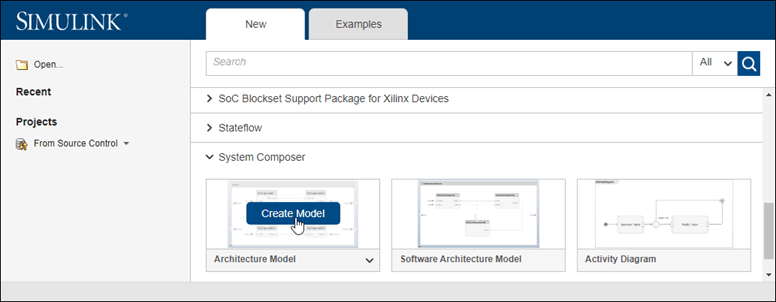
System Composer bietet Vorlagenarchitekturmodelle, die verschiedene Bereiche der Systemtechnik und Softwarearchitekturmodellierung abdecken: Architecture Model und Software Architecture Model. Alle Architekturmodelle bieten die gleichen strukturellen Funktionen mit einigen domänen- und plattformspezifischen Einschränkungen. Weitere Informationen zu Architekturvorlagen finden Sie unter Choose Architecture Template for System Design.
Ein neues, leeres Architekturmodell-Canvas wird geöffnet. Sie können ein Architekturmodell anhand des Symbols in der unteren linken Ecke und der Komponentenpalette auf der linken Seite erkennen.

Doppelklicken Sie auf die Kopfzeile des Architekturmodells und ändern Sie
untitledin einen aussagekräftigen Modellnamen, beispielsweiseRobotDesign. Der Name des Modells spiegelt in der Regel das System wider, dessen Architektur Sie erstellen.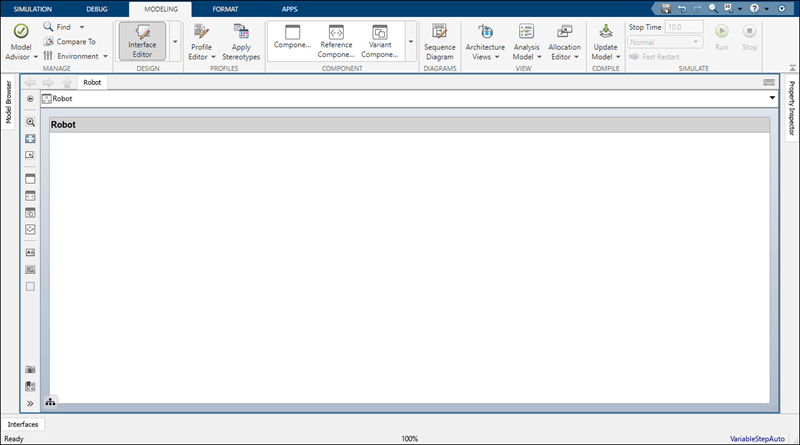
Speichern Sie das Modell.
Zeichnen von Komponenten
Entwerfen Sie einen mobilen Roboterarm, bei dem ein Sensor die Position erfasst und die Bahnplanung einen Weg zu einem Ort berechnet, den der Roboter mithilfe von Bewegungen erreichen muss. Ein Architekturmodell eines solchen Systems könnte aus drei Hauptkomponenten bestehen: Sensors, Trajectory Planning und Motion. Sie können diese Komponenten in System Composer mit drei Component-Blöcken darstellen.
Klicken Sie auf einen Component-Block
 in der Palette auf der linken Seite und ziehen Sie ihn an die gewünschte Stelle.
in der Palette auf der linken Seite und ziehen Sie ihn an die gewünschte Stelle.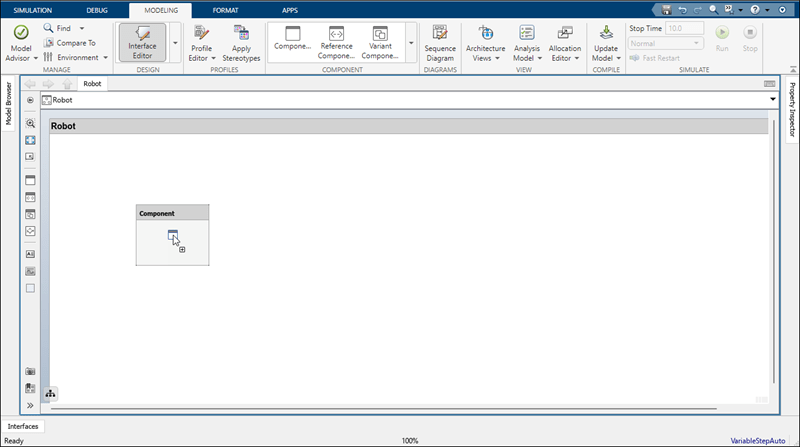
Benennen Sie die Komponente in
Sensorsum.Führen Sie diese Schritte erneut aus, um die Komponenten
Trajectory PlanningundMotionzu erstellen.
Erstellen von Ports und Verbindungen
Sie können damit beginnen, Verbindungen zwischen Komponenten herzustellen, indem Sie den Fluss von Strom, Energie, Daten oder anderen repräsentativen Informationen beschreiben. Erstellen Sie Ports auf den Komponenten, die Informationen bereitstellen oder verarbeiten, sowie Konnektoren, die zwei Komponentenports verbinden, um den Informationsfluss darzustellen.
Sie können einer Komponente auf jeder Seite einen Port hinzufügen und der Port kann entweder eine Ein- oder Ausgangsfunktion haben. Um einen Port zu erstellen, halten Sie den Cursor über eine Komponentenseite. Klicken Sie, um die Port-Optionen anzuzeigen. Wählen Sie entweder Input, Output oder Physical um einen Port zu erstellen. Benennen Sie den Port mit einem Namen, der die Informationen repräsentiert, die über diesen Port übertragen werden.
Erstellen Sie einen Ausgabe-Port an der Unterseite der Sensorkomponente. Benennen Sie ihn in SensorData um.
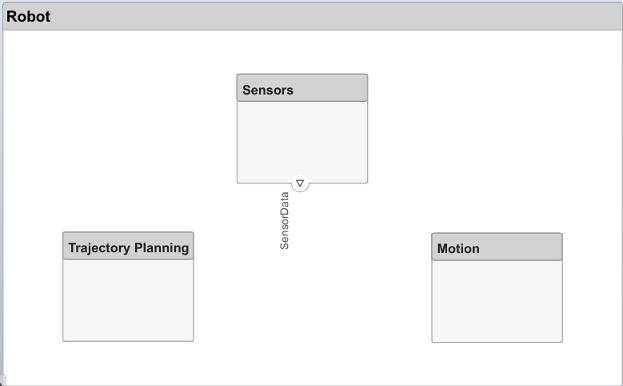
Klicken Sie auf die SensorData-Ausgabe und ziehen Sie eine Linie zur Komponente
Motion. Wenn Sie einen Eingabe-Port auf der Komponentenseite sehen, lassen Sie den Zeiger los. Standardmäßig hat dieser neue Port denselben Namen wie der Quell-Port.Halten Sie an der Ecke der SensorData-Linie an, bis Sie das Zweig-Symbol
 sehen. Rechtsklicken Sie auf eine Verzweigungslinie und ziehen Sie sie auf die Komponente
sehen. Rechtsklicken Sie auf eine Verzweigungslinie und ziehen Sie sie auf die Komponente Trajectory Planning.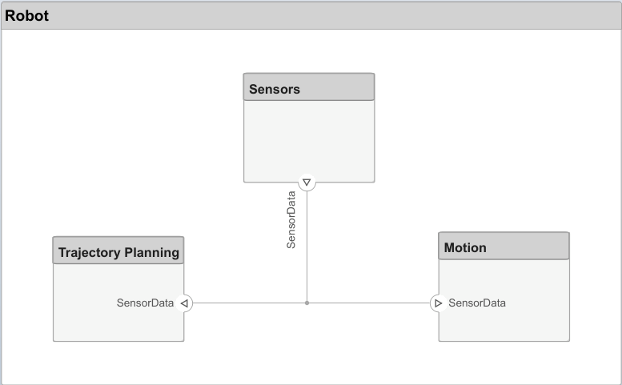
Vervollständigen Sie die Verbindungen wie in dieser Abbildung gezeigt.

Die oberste Ebene des Architekturmodells kann auch Ports enthalten, die die Interaktion des Systems mit seiner Umgebung beschreiben. In diesem Beispiel wird die Zielposition für den Roboter von einem Computer außerhalb des Roboters selbst vorgegeben. Stellen Sie diese Beziehung mit einem Eingabe-Port dar.
Klicken Sie auf den linken Rand des Architekturmodells und geben Sie den Port-Namen TargetPosition ein.
Verbinden Sie einen Architektur-Port mit einer Komponente, indem Sie eine Linie vom Eingabe-Port TargetPosition zur Komponente
Trajectory Planningziehen. Verbindungen zu oder von einem Architektur-Port werden als Tags angezeigt.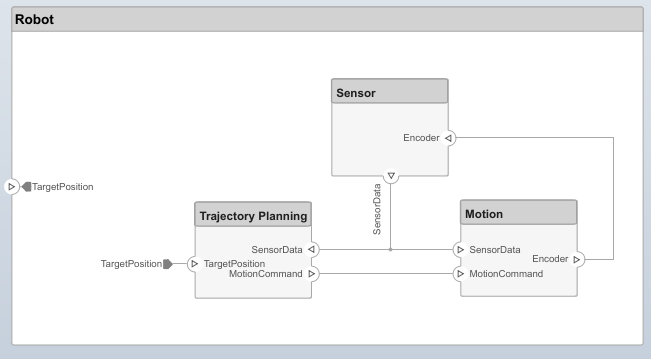
Bearbeiten von Datenschnittstellen
Sie können eine Datenschnittstelle definieren, um eine Verbindung und die zugehörigen Ports vollständig zu spezifizieren. Eine Datenschnittstelle kann aus mehreren Datenelementen mit unterschiedlichen Dimensionen, Einheiten und Datentypen bestehen. Um die Konsistenz beim Verbinden eines Ports zu überprüfen, können Sie während des Komponentendesigns Schnittstellen auch mit nicht verbundenen Ports verknüpfen.
Legen Sie den Informationsfluss durch einen Port zwischen Komponenten fest, indem Sie die Datenschnittstelle mit Attributen konfigurieren. Eine Datenschnittstelle kann so einfach wie das Senden eines ganzzahligen Werts sein, aber auch eine Reihe von Zahlen, eine Aufzählung, eine Kombination aus Zahlen und Zeichenfolgen oder ein Bündel anderer vordefinierter Schnittstellen umfassen.
Beachten Sie die Datenschnittstelle zwischen den Komponenten Sensors und Motion. Die Sensordaten umfassen:
Positionsdaten von zwei Motoren
Hindernisnäherungsdaten von zwei Sensoren
Einen Zeitstempel, um die Aktualität der Daten zu erfassen
Um den Interface Editor zu öffnen, navigieren Sie zu Modeling > Interface Editor.
Klicken Sie auf die Schaltfläche
 , um eine Datenschnittstelle hinzuzufügen. Benennen Sie die Schnittstelle
, um eine Datenschnittstelle hinzuzufügen. Benennen Sie die Schnittstelle sensordata.Die Datenschnittstelle wird separat von einem Komponenten-Port benannt und definiert und anschließend einem Port zugewiesen.
Klicken Sie auf den Ausgabe-Port SensorData der Komponente
Sensors. Rechtsklicken Sie im Interface Editor aufsensordataund wählen Sie Assign to Selected Port(s).Wenn Sie erneut auf
sensordataklicken, werden die drei SensorData-Ports hervorgehoben, was anzeigt, dass die verbundenen Ports mit dieser Schnittstelle verknüpft sind.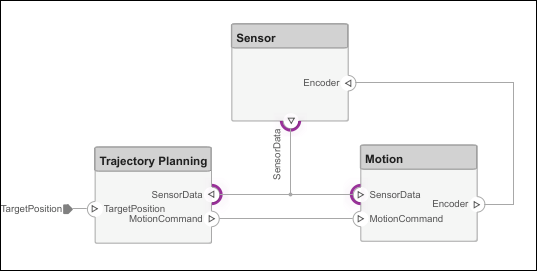
Fügen Sie der ausgewählten Datenschnittstelle ein Datenelement hinzu. Klicken Sie auf die Schaltfläche
 , um ein Datenelement hinzuzufügen, und benennen Sie es
, um ein Datenelement hinzuzufügen, und benennen Sie es timestamp.Fügen Sie weitere Datenelemente wie angegeben zur Datenschnittstelle hinzu, indem Sie auf die Schaltfläche zum hinzufügen von Datenelementen klicken.
Name Typ Einheiten timestampdoublesecondsdirection1doubledegreesdirection2doubledegreesdistance1doublemetersdistance2doublemetersposition1doubledegreesposition2doubledegreesBearbeiten Sie die Eigenschaften eines Datenelements im Interface Editor. Klicken Sie auf die Zelle, die dem Datenelement in der Tabelle entspricht, und fügen Sie Einheiten gemäß der Spezifikation hinzu.
Klicken Sie auf die Dropdown-Liste neben der Schaltfläche
 , um die Datenschnittstelle in einem Data Dictionary zu speichern. Ein Data Dictionary ermöglicht Ihnen die gemeinsame Verwaltung und Freigabe einer Reihe von Schnittstellen zwischen Modellen. Wenn Sie beispielsweise zu einem späteren Zeitpunkt im Entwurf beschließen, den externen Computer als separates Architekturmodell zu modellieren, können dieses Modell und das
, um die Datenschnittstelle in einem Data Dictionary zu speichern. Ein Data Dictionary ermöglicht Ihnen die gemeinsame Verwaltung und Freigabe einer Reihe von Schnittstellen zwischen Modellen. Wenn Sie beispielsweise zu einem späteren Zeitpunkt im Entwurf beschließen, den externen Computer als separates Architekturmodell zu modellieren, können dieses Modell und das Robot-Modell dasselbe Data Dictionary verwenden. Hier wird das Dictionary unter dem NamenRobotDDgespeichert.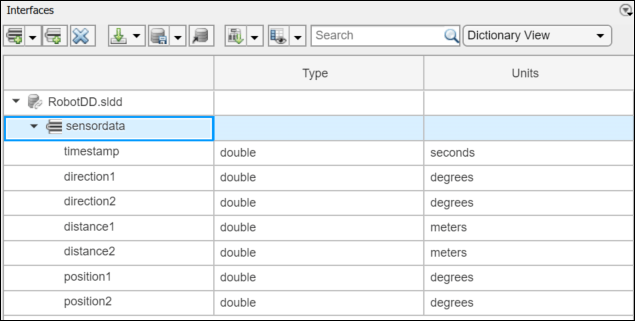
Zerlegen von Komponenten
Jede Komponente kann über eine eigene Architektur verfügen. Doppelklicken Sie auf eine Komponente, um sie in ihre Unterkomponenten zu zerlegen.
Doppelklicken Sie auf die Komponente
Trajectory Planning. Die Explorer-Leiste und Model Browser geben die Position der Komponente in der Modellhierarchie an.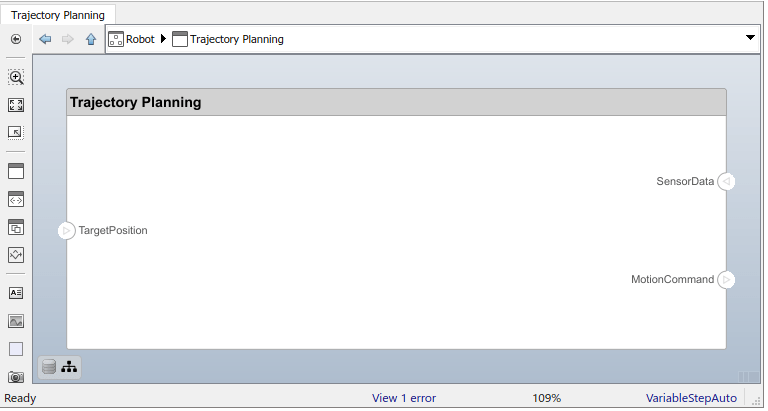
Diese Komponente verwendet zunächst die Motorpositionsdaten, die Teil der
sensordata-Schnittstelle sind, um den idealen Positions- und Geschwindigkeitsbefehl zu berechnen. Anschließend verarbeitet sie die Informationen zum Hindernisabstand in derselben Schnittstelle, um diesen Bewegungsbefehl gemäß bestimmten Sicherheitsregeln anzupassen.Fügen Sie die Komponenten
Motion ControlundSafety Rulesals Teil der ArchitekturTrajectory Planninghinzu.Ziehen Sie den Port TargetPosition auf die Komponente
Motion Control. Fügen Sie einen Command-Ausgabe-Port zuMotion Controlhinzu und ziehen Sie dann eine Linie zur KomponenteSafety Rules. Ziehen Sie die Verbindungslinien vom Port SensorData zu den KomponentenMotion ControlundSafety Rules.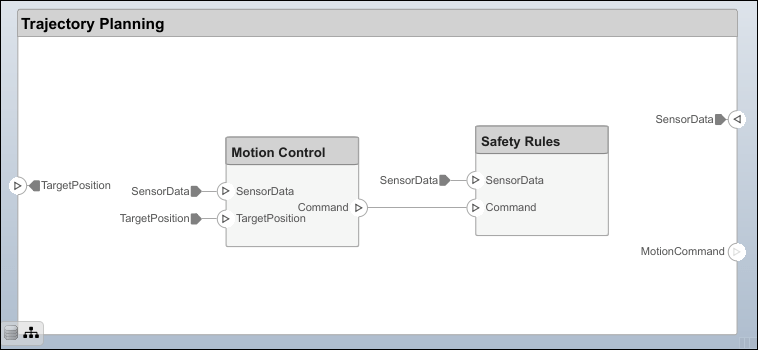
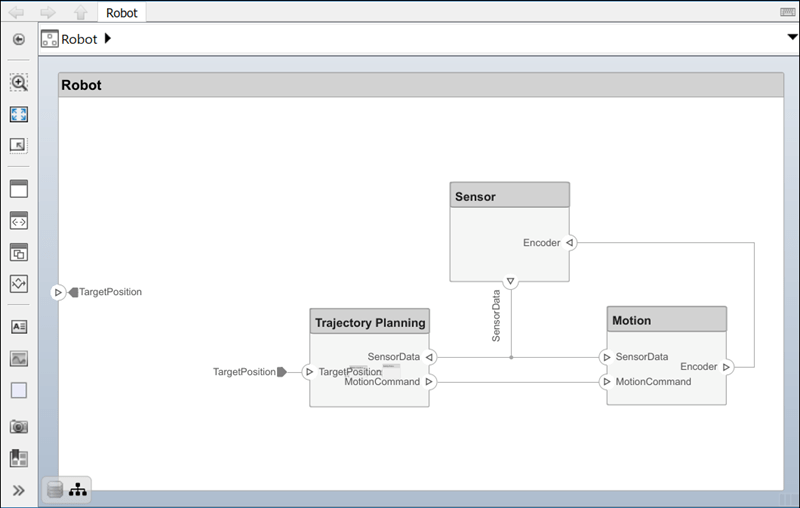
Architekturmodell eines Roboterarms
Öffnen Sie das Architekturmodell eines Roboterarms, der aus Sensoren, Bewegungsaktuatoren und einem Planungsalgorithmus besteht. Mit System Composer können Sie die Schnittstellen anzeigen und die Anforderungen für dieses Modell verwalten.
Verwalten von Anforderungsverknüpfungen
Anforderungen sind ein wesentlicher Bestandteil des Systemengineering-Prozesses. Einige Anforderungen beziehen sich auf die Funktionalität des Gesamtsystems, andere auf Leistungsmerkmale wie Leistung, Größe und Gewicht. Die Aufschlüsselung übergeordneter Anforderungen in untergeordnete Anforderungen und die Ableitung zusätzlicher Anforderungen sind entscheidend für die Definition der Architektur des Gesamtsystems. Beispielsweise bestimmt der Gesamtstromverbrauch des Roboters die Anforderungen an den Stromverbrauch der Robotersteuerung.
Um Anforderungen mit Systemelementen zuzuordnen und zu verfolgen, ist System Composer vollständig in die Requirements Toolbox integriert. Um geeignete Anforderungen abzuleiten, müssen Sie manchmal Eigenschaften (z. B. Leistung) für Elemente des Systems, einschließlich Komponenten, Ports oder Anschlüsse, analysieren und spezifizieren. Wenn beispielsweise die Gesamtkosten des Systems eine Rolle spielen, ist eine unitPrice-Eigenschaft erforderlich.
Verwalten Sie Anforderungen aus der Requirements-Ansicht in System Composer mithilfe der Requirements Toolbox. Navigieren Sie zu Apps > Requirements Manager.. Weitere Informationen finden Sie unter Anzeigen und Verknüpfen von Anforderungen in Simulink (Requirements Toolbox).
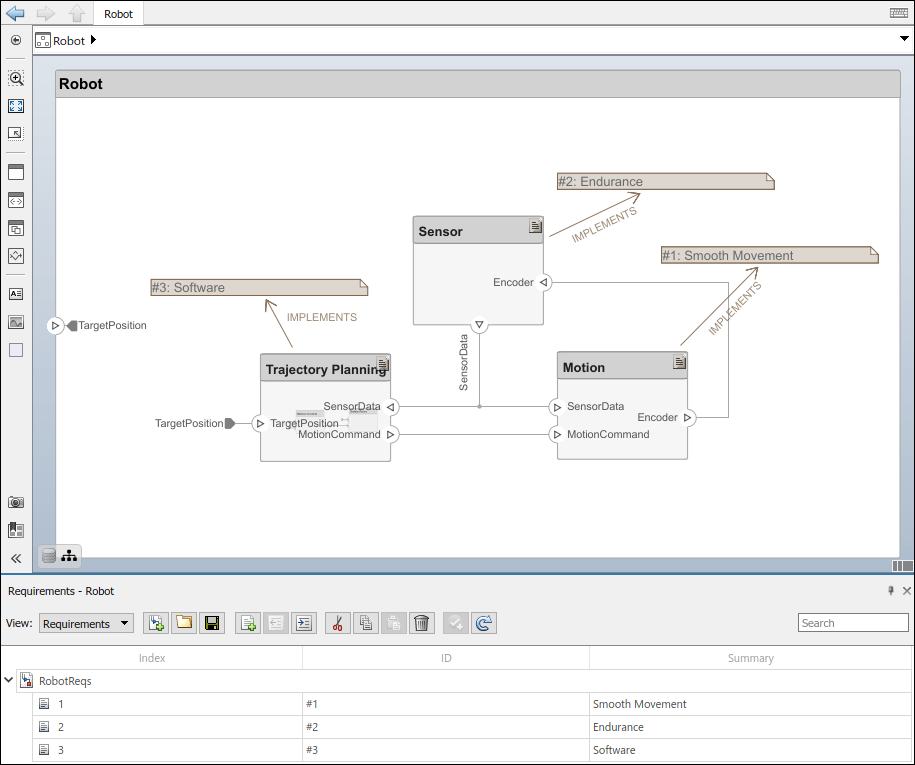
Um die Rückverfolgbarkeit von Anforderungen zu verbessern, verknüpfen Sie Anforderungen mit Architekturkomponenten und Ports. Wenn Sie in der Requirements-Ansicht auf eine Komponente klicken, werden die verknüpften Anforderungen hervorgehoben. Umgekehrt werden beim Klicken auf eine Anforderung die verknüpften Komponenten angezeigt. Um eine Verknüpfung direkt zu erstellen, ziehen Sie eine Anforderung auf eine Komponente oder einen Port.
Siehe auch
Themen
- Erweitern des architektonischen Design mithilfe von Stereotypen
- Analysieren der Eigenschaften des Architekturmodells mit der Analysefunktion
- Überprüfen von Komponenten in benutzerdefinierten Architekturansichten
- Implementierung von Verhaltensweisen für die Architekturmodellsimulation
- Konzepte des System Composer