Entwerfen und Analyse von Systemen mithilfe von Architekturmodellen
Ein System bezeichnet eine Zusammensetzung von Elementen, die zusammenwirken, um ein Ziel zu erreichen, das kein einzelnes Element für sich allein erreichen könnte. Die Bestandteile eines Systems können mechanische Teile, elektrische Schaltkreise, Computerhardware und Software umfassen. Eine Systemspezifikation beschreibt die Systemelemente, ihre Merkmale und Eigenschaften, ihre Wechselwirkungen untereinander und die gewünschte Interaktion (oder Schnittstelle) des Gesamtsystems mit seiner Umgebung.
System Composer™ ermöglicht es Ihnen, Systeme anhand von Architekturmodellen als Kombination aus strukturellen Elementen mit zugrunde liegenden Verhaltensbeschreibungen und Designfunktionalitäten zu beschreiben. Diese Modelle können mehrere Blickwinkel haben, die Diagramme erzeugen, die mit dem Modell übereinstimmen.
Um einen grundlegenden System Engineering Workflow zum Entwerfen eines mobilen Roboterarms mit System Composer durchzuführen, gehen Sie wie folgt vor.
Erstellen eines Architekturmodells mit Schnittstellen und Anforderungsverknüpfungen
Erweitern des architektonischen Design mithilfe von Stereotypen
Analysieren der Eigenschaften des Architekturmodells mit der Analysefunktion
Überprüfen von Komponenten in benutzerdefinierten Architekturansichten
Implementierung von Verhaltensweisen für die Architekturmodellsimulation
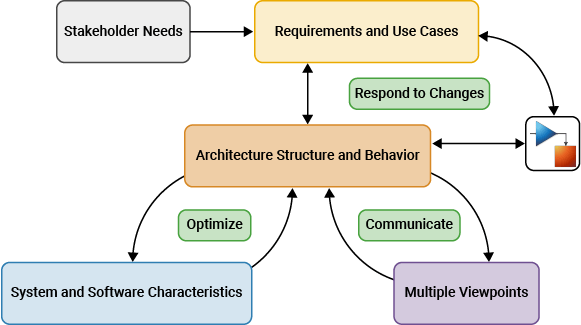
Der durch System Composer ermöglichte Workflow für das Model-Based Systems Engineering (MBSE) beginnt mit den Anforderungen der Stakeholder, der Identifizierung von Anforderungen und Anwendungsfällen, dem iterativen Entwurf einer Architektur und der Implementierung der Designfunktionalität mithilfe von Verhaltensmodellen. Sie können auch Analysen und Vergleichsstudien nutzen, um die Architektur zu optimieren und Facetten des Systems mithilfe von Architekturansichten zu kommunizieren. Diese Abbildung veranschaulicht einen MBSE-Workflow.
Mit System Composer können Sie einen System Engineering Workflow implementieren.
Erstellen von Architekturmodellen und Definieren von Systemanforderungen:
Erstellen Sie hierarchische Modelle der Systemstruktur, die funktionale, logische oder physische Zerlegungen des Systems mithilfe von Komponenten, Ports und Anschlüssen darstellen.
Importieren Sie Modelle aus MATLAB®-Tabellen und exportieren Sie diese mit System Composer-Änderungen.
Bearbeiten und zeigen Sie die instanzspezifischen Parameter an, die als Modellargumente für eine Komponente oder Architektur angegeben sind, indem Sie den Parameter Editor verwenden.
Erstellen und verwalten Sie Datenschnittstellen zwischen strukturellen architektonischen Elementen mithilfe des Interface Editor.
Verwalten Sie Zuordnungen zwischen Modellen, um Beziehungen zwischen Softwarekomponenten und Hardwarekomponenten darzustellen und Bereitstellungsstrategien mithilfe des Allocation Editor anzugeben.
Verfeinern und präzisieren Sie die Anforderungen mithilfe der Requirements Toolbox™ im Requirements Editor (Requirements Toolbox). Verknüpfen Sie Anforderungen mit Elementen des Architekturmodells.
Definieren von Metadaten, Erstellen von Ansichten, Beschreiben des Systemverhaltens und Analysieren von Architekturen:
Erweitern Sie grundlegende Architekturelemente, um domänenspezifische konzeptionelle Darstellungen mithilfe des Profile Editor zu erstellen.
Filtern Sie die Ansichten der Systemstruktur mithilfe eines Komponentendiagramms, eines Hierarchiediagramms oder eines Klassendiagramms in der Architecture Views Gallery.
Stellen Sie die Interaktion zwischen strukturellen Elementen einer Architektur als eine Abfolge von Nachrichtenaustauschen mit einem Sequenzdiagramm in der Architecture Views Gallery dar.
Beschreiben und validieren Sie das Systemverhalten, indem Sie mit dem Allocation Editor ein Aktivitätsdiagrammelement einem Architekturmodellelement zuordnen.
Führen Sie statische Analysen und Vergleichsstudien durch, um Architekturen mit den Tools Instantiate Architecture Model und Analysis Viewer zu optimieren.
Implementieren von Komponentenverhalten und Verwenden simulationsbasierter Workflows zur Überprüfung von Anforderungen:
Legen Sie das Verhalten von Komponenten mithilfe von Blockdiagrammen in Simulink®, Zustandsmaschinen in Stateflow® und physischen Schnittstellen in Simscape™ unter Verwendung von Verhaltensweisen von Subsystemen fest.
Entwerfen Sie ein Softwarearchitekturmodell, legen Sie die Ausführungsreihenfolge der Funktionen aus den Komponenten im Functions Editor fest, simulieren Sie den Entwurf auf Architekturebene und generieren Sie den Code.
Überprüfen und validieren Sie die Anforderungen mit Simulink Test™ mithilfe des Simulink Test Manager (Simulink Test).
Erstellen Sie Berichte mithilfe von Simulink Report Generator™. Weitere Informationen finden Sie unter Generate System Architecture Reports.
Tipp
Weitere Informationen darüber, wie die Konzepte von System Composer auf das System-Engineering-Design angewendet werden, finden Sie unter Konzepte des System Composer.