sim
Run and script programmatic simulations of Simulink models
Syntax
Description
Simulink.SimulationInput Object Syntax
simout = sim(simin)Simulink.SimulationInput
objects.
If
siminis a scalarSimulink.SimulationInputobject, thensimoutis a scalarSimulink.SimulationOutputobject.If
siminis a vector, matrix, or array ofSimulink.SimulationInputobjects, thensimoutis a vector, matrix, or array ofSimulink.SimulationOutputobjects with the same dimensions assimin.
You can use a SimulationInput object to configure options and
inputs for simulations, including:
The model to simulate
Source variables or files for external input data
Block parameter values to use for the simulation
Model configuration parameter values to use for the simulation
When a property of the SimulationInput object modifies a
model or block parameter value, the value is modified during simulation and
reverted at the end of the simulation.
When you configure programmatic simulations using SimulationInput
objects, you can easily transition from using the sim
function to using other functions, such as parsim and batchsim.
For more information, see Run Simulations Programmatically.
simout = sim(simin,Name=Value)Simulink.SimulationInput object simin
with additional options specified using one or more name-value arguments.
For a list of name-value arguments supported for the
Simulink.SimulationInput syntax, see Simulink.SimulationInput Object Syntax.
Model Syntax
simout = sim(mdl)mdl using the current configuration parameter and
block parameter values for the model.
If the model has the Single simulation output parameter enabled,
simoutis aSimulink.SimulationOutputobject.If the model does not have the Single simulation output parameter enabled,
simoutis a vector that contains the simulation times. For more information, see Syntaxes that return multiple output arguments are not recommended.
simout =
sim(mdl,Name=Value)mdl with options specified using one or more name-value
arguments. For example, you can modify a model configuration parameter value for
the simulation by specifying the parameter name and value as a name-value
argument.
When you modify model configuration parameters by providing inputs to the
sim function, the changes are applied during simulation
and reverted at the end of the simulation.
For a list of name-value arguments supported for the model syntax, see Model Syntax.
simout =
sim(mdl,paramstruct)mdl using the model configuration parameter values
specified by the structure paramstruct.
Examples
You can use a Simulink.SimulationInput object to store the configuration for a simulation separate from the model you simulate. The configuration in the Simulink.SimulationInput object is applied to the model for the simulation. After simulation, any model settings that were changed revert to the original value.
Open the model IntegrateSine. The model uses an Integrator block to integrate the output of a Sine Wave block. The output from the Integrator block is connected to an Outport block.

mdl = "IntegrateSine";
open_system(mdl)Create a Simulink.SimulationInput object to store a simulation configuration for the model IntegrateSine.
simIn = Simulink.SimulationInput(mdl);
Use the setModelParameter function to configure the SimulationInput object to use the ode45 solver and to simulate to a stop time of 20 seconds.
simIn = setModelParameter(simIn,"Solver","ode45",... "StopTime","20");
Use the setBlockParameter function to configure the SimulationInput object to set the Amplitude parameter of the Sine Wave block to 2.
blk = strcat(mdl,"/Sine Wave"); simIn = setBlockParameter(simIn,blk,"Amplitude","2");
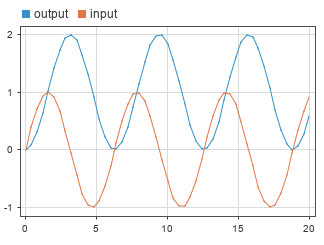
Simulate the model using the configuration stored in the Simulink.SimulationInput object simIn.
out = sim(simIn);
The model simulates for 20 seconds, using the ode45 solver and an amplitude of 2 for the Sine Wave block.

When you use an array of Simulink.SimulationInput objects to configure a set of simulations, you can use a single call to the sim function to run the set of simulations using fast restart. Fast restart saves time in simulation by keeping the model compiled between simulation runs.
Open the model IntegrateSine. The model uses an Integrator block to integrate the output of a Sine Wave block. The output from the Integrator block is connected to an Outport block.
mdl = "IntegrateSine";
open_system(mdl)
Suppose you want to run a set of six simulations that each use a different frequency value for the Sine Wave block. Create a vector that contains the frequency values for the simulations.
freqs = [0.5 1 1.5 2 2.5 3];
When you want to tune a block parameter, you can define the value of the parameter using a variable. Then, to tune the block parameter, you change the value of the variable.
Define the variable freq to use for the value of the Frequency parameter for the Sine Wave block. For the initial variable value, use the current parameter value.
blk = mdl + "/Sine Wave"; freq = str2double(get_param(blk,"Frequency"));
Set the Frequency parameter value for the Sine Wave block to freq.
set_param(blk,"Frequency","freq")
In a for loop, create an array of six Simulink.SimulationInput objects and use the setVariable function to configure each object to use a value from the vector of frequencies.
for k = length(freqs):-1:1 simIn(k) = Simulink.SimulationInput(mdl); simIn(k) = setVariable(simIn(k),"freq",freqs(k)); end
Run the simulations defined by the array of SimulationInput objects simIn using the sim function. Enable fast restart using the UseFastRestart name-value argument. The UseFastRestart name-value argument is supported only when the first input argument is a Simulink.SimulationInput object. To use fast restart when the first argument is the name of a model, use the FastRestart name-value argument.
out = sim(simIn,"UseFastRestart","on");
[19-Apr-2026 20:04:56] Running simulations... [19-Apr-2026 20:04:57] Completed 1 of 6 simulation runs [19-Apr-2026 20:04:57] Completed 2 of 6 simulation runs [19-Apr-2026 20:04:57] Completed 3 of 6 simulation runs [19-Apr-2026 20:04:58] Completed 4 of 6 simulation runs [19-Apr-2026 20:04:58] Completed 5 of 6 simulation runs [19-Apr-2026 20:04:58] Completed 6 of 6 simulation runs
To run the same set of simulations without showing the progress messages, specify the ShowProgress name-value argument as off.
out = sim(simIn,"UseFastRestart","on","ShowProgress","off");
To monitor the progress of the simulations using the Simulation Manager, specify the ShowSimulationManager name-value argument as on. For more information about the Simulation Manager, see Simulation Manager.
out = sim(simIn,"UseFastRestart","on",... "ShowProgress","off","ShowSimulationManager","on");
The simulation output out is an array of Simulink.SimulationOutput objects that contain the metadata and results for each simulation. The order of SimulationOutput objects in the output array matches the order of SimulationInput objects in the input array. For example, the SimulationOutput object at index 1 contains the results of the simulation configured using the SimulationInput object at index 1.
Access the logged output signal for the results of the first simulation, which used a frequency value of 0.5.
youtPt5 = out(1).yout
youtPt5 =
Simulink.SimulationData.Dataset 'yout' with 1 element
Name BlockPath
______ _____________________
1 [1x1 Signal] output IntegrateSine/Outport
- Use braces { } to access, modify, or add elements using index.
Open the model IntegrateSine. The model uses an Integrator block to integrate the output of a Sine Wave block. The output from the Integrator block is connected to an Outport block.
mdl = "IntegrateSine";
open_system(mdl);
Simulate the model using the current configuration parameter values.
out = sim(mdl);
The simulation runs for 10 seconds, integrating a sine wave with an amplitude of 1.

You can modify model configuration parameter values and block parameter values in the model using the set_param function.
Configure the model to use the ode45 solver and a stop time of 20 seconds.
set_param(mdl,"Solver","ode45","StopTime","20")
Set the Amplitude parameter of the Sine Wave block to 2.
blk = strcat(mdl,"/Sine Wave"); set_param(blk,"Amplitude","2")
When you modify a configuration parameter value or block parameter value using the set_param function, the change applies to the block diagram and dirties the model file. When you call the sim function again, the simulation uses the new parameter values, which are part of the current model configuration, even if you do not save the model.
out2 = sim(mdl);
The simulation runs for 20 seconds, integrating a sine wave with an amplitude of 2.

You can configure a simulation of a model to use different values for model configuration parameter values by specifying the configuration parameters for the simulation as name-value arguments for the sim function. The parameter values you specified are applied for the simulation and reverted when the simulation completes.
You can specify only model configuration parameter values and not block parameter values as name-value arguments for the sim function. To specify model configuration parameter values, block parameter values, and variable values for a simulation in a single input, use a Simulink.SimulationInput object instead.
Open the model IntegrateSine. The model uses an Integrator block to integrate the output of a Sine Wave block. The output from the Integrator block is connected to an Outport block.
mdl = "IntegrateSine";
open_system(mdl);
Suppose you want to simulate the model using the solver ode45 and a stop time of 20 seconds. Specify the Solver and StopTime values for the simulation as name-value arguments for the sim function.
out = sim(mdl,"Solver","ode45","StopTime","20");
The model simulates through a simulation time of 20 seconds using the solver ode45.

You can use a structure of model configuration parameter names and values to configure a simulation of a model. The configuration parameter values in the structure are applied to the model for the simulation. After simulation, any model settings that changed are reverted to the original value.
The structure input can specify only model configuration parameter values and cannot specify different block parameter or variable values to use in the simulation. To specify model configuration parameter values, block parameter values, and variable values for a simulation in a single input, use a Simulink.SimulationInput object instead.
Open the model IntegrateSine. The model uses an Integrator block to integrate the output of a Sine Wave block. The output from the Integrator block is connected to an Outport block.
mdl = "IntegrateSine";
open_system(mdl)
Create the structure SimConfig that configures a simulation to use the ode45 solver and a stop time of 20 seconds. The structure contains a field for each configuration parameter to modify in the simulation. The name of each field matches the programmatic name for each parameter. The value of each field specifies the value to use for that parameter in the simulation.
simConfig.Solver = "ode45"; simConfig.StopTime = "20";
Simulate the model using the model configuration parameter values from the structure.
out = sim(mdl,simConfig);
The model simulates through a simulation time of 20 seconds using the ode45 solver.

A Simulink.ConfigSet object stores a set of model configuration parameter values. You can specify a Simulink.ConfigSet object as an input to the sim function. The configuration set from the object is applied to the model for the simulation. After simulation, the original configuration set is restored in the model.
A Simulink.Configset object stores only model configuration parameter values. To specify model configuration parameter values, block parameter values, and variable values for a simulation in a single input, use a Simulink.SimulationInput object instead.
Open the model IntegrateSine. The model uses an Integrator block to integrate the output of a Sine Wave block. The output from the Integrator block is connected to an Outport block.
mdl = "IntegrateSine";
open_system(mdl)
Use the getActiveConfigSet function to get a Simulink.ConfigSet object for the current model configuration.
mdlConfig = getActiveConfigSet(mdl);
Use the copy function to create a copy of the Simulink.ConfigSet object to modify.
simConfig = copy(mdlConfig);
Modify the Simulink.ConfigSet object simConfig to use the solver ode45 and a stop time of 20 seconds.
set_param(simConfig,"Solver","ode45","StopTime","20");
Simulate the model using the configuration parameters in the Simulink.Configset object simConfig.
out = sim(mdl,simConfig);
The model simulates through a simulation time of 20 seconds using the ode45 solver.
Input Arguments
Name-Value Arguments
Output Arguments
Tips
To ensure the
simfunction returns results in the same format for every syntax, save your model with the Single simulation output parameter enabled. With this option enabled, simulation results are returned as one or moreSimulink.SimulationOutputobjects that each contain all logged data and simulation metadata, including timing information and diagnostics, for a simulation. Returning all simulation data and metadata in a single object facilitates analyzing results from multiple simulations.When you run a simulation using the
simfunction, the simulation runs until an error occurs or the simulation reaches the specified stop time. To run or script a programmatic simulation in which you can control the simulation execution and tune parameter values during simulation, use theSimulationobject. (since R2024a) For more information, see Run Simulations Programmatically.You can interact with simulations using both the MATLAB Command Window and the Simulink Editor by issuing simulation commands using the
set_paramfunction. For more information, see Run Simulations Programmatically.When you simulate a model with infinite stop time, stop the simulation from the MATLAB Command Window by pressing Ctrl+C. The simulation stops, and simulation results are not saved in the MATLAB workspace.
Configure logging for time, states, and outputs using the Configuration Parameters dialog box. On the Modeling tab, under Setup, click Model Settings. Then, in the Configuration Parameters dialog box, select Data Import/Export.
To log signals throughout a model, use signal logging or logging blocks such as the To Workspace block or the Record block. For more information about signal logging, see Save Signal Data Using Signal Logging.