Derivative
Berechnen der ungefähren kontinuierlichen Ableitung eines kontinuierlichen Eingangssignals gegenüber der Zeit
Bibliotheken:
Simulink /
Continuous
Beschreibung
Der Derivative-Block liefert eine Schätzung der kontinuierlichen Ableitung des kontinuierlichen Eingangssignals u gegenüber der Simulationszeit t. Verwenden Sie den Derivative-Block, wenn Sie die Ableitung eines differenzierbaren Signals mit kontinuierlicher Abtastzeit berechnen müssen.
Eine unsachgemäße Verwendung des Derivative-Blocks kann zu ungenauen Simulationsergebnissen führen. So möglich, ziehen Sie diese Alternativen zu dem Derivative-Block in Betracht:
Stellen Sie die Gleichungen des Systems um, sodass ein Integral statt einer Ableitung errechnet wird. Strukturieren Sie das Modell daraufhin auf Basis der neuen Gleichungen so, dass die Software mit Blöcken wie dem Integrator-Block ein Integral statt einer Ableitung berechnet.
Ein Beispiel finden Sie unter Best-Form Mathematical Models.
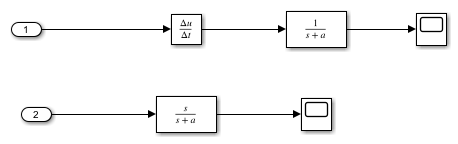
Wenn ein Transfer Fcn-Block zudem als Eingangs- oder Ausgangssignal des Derivative-Blocks fungiert, implementieren Sie die Ableitung des Signals, indem Sie stattdessen eine Null in der Transferfunktion hinzufügen.
Um den Differenzenquotient für ein diskretes Signal in einem diskreten System zu berechnen, verwenden Sie den Discrete Derivative-Block.
Wenn Sie den Derivative-Block verwenden müssen, verwenden Sie den Block nur für differenzierbare Eingangssignale mit kontinuierlicher Abtastzeit.
Die Software gibt eine Warnung aus, wenn das mit diesem Port verbundene Signal eine diskrete oder in kleinen Zeitschritten feste Abtastzeit aufweist. (seit R2023b)
Die Software gibt keine Warnung aus, wenn das Eingangssignal eine konstante Abtastzeit aufweist, eine Abstimmung des Signals führt jedoch zu einer Diskontinuität im Eingangssignal. Eine Differenzierung über diese Diskontinuitäten hinweg erzeugt Spitzen im Ausgangssignal.
Um den Differenzenquotient für ein diskretes Signal in einem diskreten System zu berechnen, verwenden Sie den Discrete Derivative-Block.
Gewährleisten der Präzision kontinuierlicher Ableitungs-Annäherungen
Wenn Sie den Derivative-Block verwenden, müssen Sie sicherstellen, dass die Präzision des Block-Ausgangssignals Ihren Anforderungen entspricht. Selbst bei Verwendung im korrekten Kontext hängt die Präzision des Ausgangssignals des Derivative-Blocks von der Schrittgröße ab und könnte von der Dynamik des restlichen Systems abhängen.
Mit dem Parameter Max step size können Sie verhindern, dass ein Solver mit variabler Schrittgröße Schritte macht, die für Ihre Präzisionsanforderungen zu groß sind. Um einen angemessenen Wert für die maximale Schrittgröße zu ermitteln, müssen Sie ggf. mehrere Simulationen ausführen.
Bei Simulationen mit variabler Schrittgröße ermittelt der Solver die Größe jedes wichtigen Zeitschritts, indem er Berechnungen kontinuierlicher Zustände im gesamten Modell auf Fehler überwacht. Wenn der Fehler im berechneten Wert für einen kontinuierlichen Zustand die angegebenen Toleranzwerte überschreitet, reduziert der Solver die Schrittgröße, bis der Fehler innerhalb der Toleranzen liegt.
Der Derivative-Block weist keine kontinuierlichen Zustände auf; der Solver kann daher nicht die Schrittgröße ändern, um zu gewährleisten, dass die Berechnungen des Derivative-Blocks den Toleranzanforderungen entsprechen. Wenn der Solver einen großen Zeitschritt macht, wenn sich der Eingangssignal-Wert schnell ändert, könnte der Block einen unerwarteten Ausgangswert erzeugen.
Beispiele
Improved Linearization with Transfer Fcn Blocks
Improved Linearization with Transfer Fcn Blocks.
Ports
Eingabe
Ausgabe
Parameter
Blockeigenschaften
Datentypen |
|
Direct Feedthrough |
|
Mehrdimensionale Signale |
|
Signale mit variabler Größe |
|
Erkennung von Nulldurchgängen |
|
Algorithmen
Der Derivative-Block berechnet die numerische Differenz um einen Näherungswert für die kontinuierliche Ableitung zu bestimmen, wobei die Änderung im Eingangssignalwert und die Größe des großen Zeitschritts ist, mit dem der Solver die aktuelle Simulationszeit erreicht hat. Die Präzision der kontinuierlichen Ableitungs-Näherung hängt von der Änderungsrate des Eingangssignals und der Schrittgröße ab.
Der anfängliche Ausgangswert des Derivative-Blocks ist stets 0. Unter Berücksichtigung des anfänglichen Ausgangswerts stellt diese Gleichung die präzise Beziehung zwischen den Eingangs- und Ausgangssignalen des Blocks dar.
t ist die aktuelle Simulationszeit.
ist die Zeit des letzten großen Zeitschritts der Simulation.