Anwendungen für die Industrieautomatisierung
Simulink® ermöglicht es Herstellern von Industrieanlagen, ausführbare Spezifikationen in Form von Modellen zu erstellen, die klare Designvorgaben für verschiedene Entwicklungsteams liefern. Die nachfolgenden Beispielmodelle veranschaulichen Anwendungen in der Industrieautomatisierung.
Enthaltene Beispiele
Model and Control Robot Dynamics to Automate Virtual Assembly Line
Extends the Smart4i virtual commissioning applications to accommodate robot dynamics in the system framework to automate assembly line operation. This example models the digit twin of the Smart4i setup and controls the dynamics of robots in the assembly line, which helps develop a more realistic simulation environment. The virtual assembly line consists of four components: two robotic workcells, connected by a shuttle track and a conveyor belt. The first robot, Robot 1, is a Comau Racer V3 and places cups onto the shuttle. The second robot, Robot 2, is a Mitsubishi RV-4F and places balls in the cups. The shuttle track system consists of four shuttles which continuously move to Robot 1, then to Robot 2, followed by a slider. A slider then delivers those cups containing balls to a container. This example downloads the assembly line CAD data, robot model files and shuttle trajectory data. For a detailed system overview, see Automate Virtual Assembly Line with Two Robotic Workcells (Robotics System Toolbox).
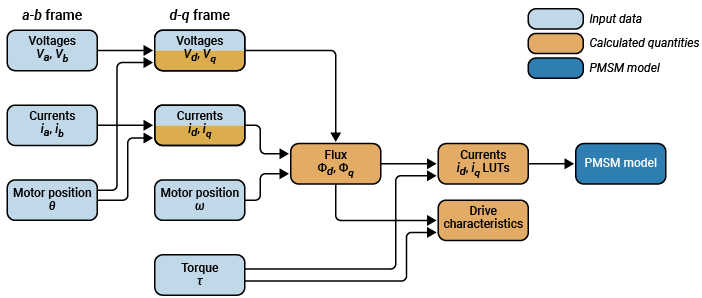
Determine Nonlinear Behavior of PMSM Using Characterization Test Data
Build realistic closed-loop simulation of PMSM using characterization test data and obtain nonlinear operating characteristics.
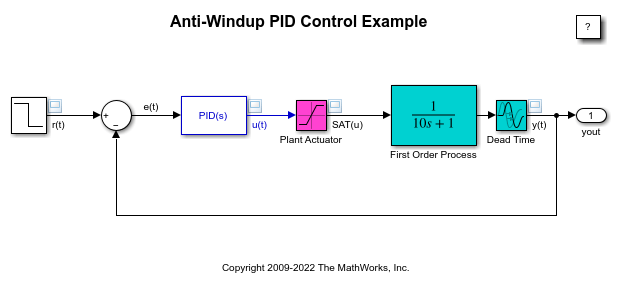
Anti-Windup-Regelung mithilfe eines PID Controller-Blocks
Dieses Beispiel zeigt, wie Sie Anti-Windup-Methoden verwenden können, um ein Integrations-Windup bei PID-Reglern zu vermeiden, wenn die Aktoren gesättigt sind. Der Block „PID Controller“ in Simulink® umfasst zwei integrierte Anti-Windup-Methoden, back-calculation und clamping sowie einen Trackingmodus für den Umgang mit komplexeren industriellen Szenarien. Der Block „PID Controller“ unterstützt mehrere Funktionen, die einen Umgang mit Steuerungs-Windup-Problemen in häufig auftretenden industriellen Szenarien ermöglichen.
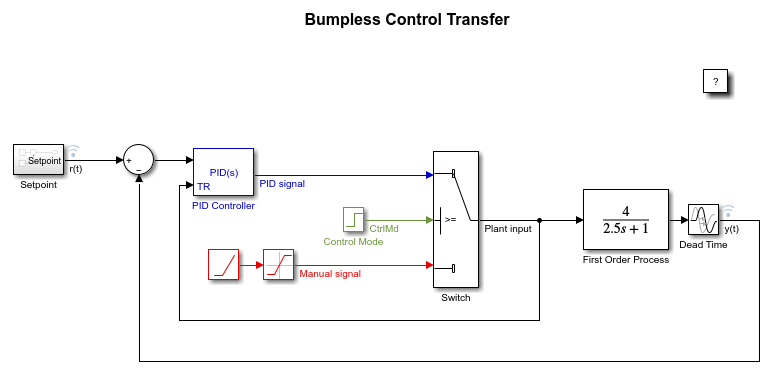
Bumpless Control Transfer Between Manual and PID Control
Achieve bumpless control transfer when switching from manual control to proportional integral derivative (PID) control. The model uses the PID Controller block in Simulink® to control a first-order process with dead-time.
Two Degree-of-Freedom PID Control for Setpoint Tracking
Regulate the speed of an electric motor using two degree-of-freedom PID control with set-point weighting. This model uses the PID Controller (2DOF) block. The model changes the setpoint values between 60 and 30 rpm. To convert the units to rad/s for use in the PID controller, the model uses a Signal Conversion block.
Job Scheduling and Resource Estimation for a Manufacturing Plant
Model a manufacturing plant. The plant consists of an assembly line that processes jobs based on a pre-determined schedule. This example walks you through a workflow for:

Shape Tracing Manipulator with Simulink 3D Animation
Model and visualize the shape tracing manipulator in the 3D environment.

Simulate and Generate Code for Airport Conveyor Belt Control System
Simulate and generate code for the Controller subsystem from an airport conveyor belt model.

Pick and Place Robot Using Forward and Inverse Kinematics
Model a delta robot performing a pick and place task.
Cartesian 3-D Printer
Models a Cartesian 3-D printer. The model allows you to specify the rotational motion of the motor on each axis to define a printing path. In this example, the printing head moves along the edges of two letters, S and M, using the predefined rotational motions.