Translational Damper
Viscous damper in mechanical translational systems

Libraries:
Simscape /
Foundation Library /
Mechanical /
Translational Elements
Description
The Translational Damper block represents an ideal mechanical translational viscous damper, described with the following equations:
where
F is force transmitted through the damper.
D is damping coefficient, defined by viscous friction.
v is relative velocity.
vR and vC are absolute velocities of ports R and C, respectively.
The block positive direction is from port R to port C. This means that the force is positive if it acts in the direction from R to C.
Variables
To set the priority and initial target values for the block variables prior to simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
Nominal values provide a way to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. Nominal values can come from different sources, one of which is the Nominal Values section in the block dialog box or Property Inspector. For more information, see Modify Nominal Values for a Block Variable.
Examples

Mass-Spring-Damper with Controller
A controlled mass-spring-damper. A controller adjusts the force on the mass to have its position track a command signal. The initial velocity for the mass is 10 meters per second. The controller adjusts the force applied by the Force Source to track the step changes to the input signal.
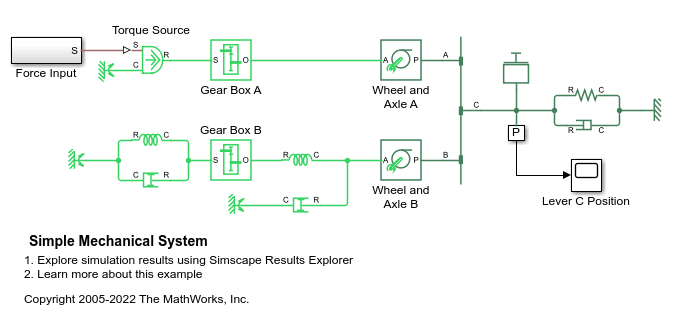
Simple Mechanical System
A model of a system that connects rotational and translational motion. A summing lever drives a load consisting of a mass, viscous friction, and a spring connected to its joint C. Joint B is suspended on two rotational springs connected to reference point through a wheel and axle and a gear box. Joint A is connected to a torque source through a gear box and a wheel and axle mechanism.
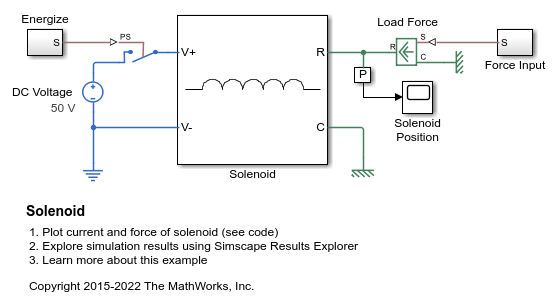
Solenoid
A solenoid with a spring return. The solenoid is modeled as an inductance whose value L depends on the plunger position x. The back emf for a time-varying inductance is given by:
Ports
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2007a