Magnetventil
In diesem Beispiel ist ein Magnetventil mit Federrückstellung dargestellt. Das Magnetventil wird als Induktivität modelliert, deren Wert L von der Kolbenposition x abhängig ist. Die elektromotorische Gegenkraft für eine mit der Zeit variierende Induktivität wird wie folgt angegeben:

Da L von x abhängig ist, wird dies zu:

 kann aus den Kraft-Hub-Daten des Herstellers mithilfe der folgenden Beziehung abgeleitet werden:
kann aus den Kraft-Hub-Daten des Herstellers mithilfe der folgenden Beziehung abgeleitet werden:

kann dann integriert werden, um L als Funktion von x zu erhalten.
Im Modell wird Gleichung 2 umgestellt, um nach i aufzulösen. Anschließend wird sie mithilfe von „Physical Signal“-Blöcken implementiert. Eine geregelte Stromquelle begrenzt dann den Strom auf den Wert i.
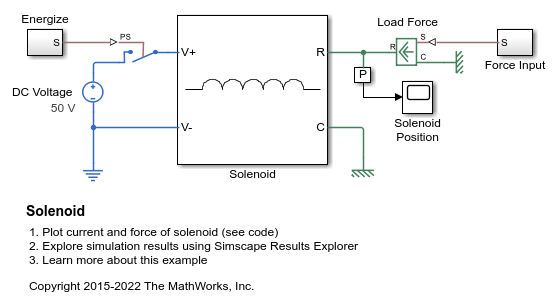
Modell
Subsystem „Solenoid“

Simulationsergebnisse der Simscape-Protokollierung
