Translational Friction
Reibung beim Kontakt zwischen sich bewegenden Körpern

Bibliotheken:
Simscape /
Foundation Library /
Mechanical /
Translational Elements
Beschreibung
Der Translational Friction-Block stellt die Reibung beim Kontakt zwischen sich bewegenden Körpern dar. Die Reibungskraft wird als Funktion der Relativgeschwindigkeit simuliert. Dabei wird davon ausgegangen, dass sie der Summe der Stribeck-, Coulomb- und viskosen Komponenten entspricht, wie in der folgenden Abbildung dargestellt.
![]()
Die Stribeck-Reibung FS bezeichnet den negativ geneigten Bereich der Reibkennlinie bei niedrigen Geschwindigkeiten [1]. Die Coulomb-Reibung FC führt bei jeder Geschwindigkeit zu einer konstanten Kraft. Die viskose Reibung FV wirkt der Bewegung mit einer Kraft entgegen, die direkt proportional zur Relativgeschwindigkeit ist. Die Summe der Coulomb- und Stribeck-Reibung in der Nähe der Geschwindigkeit null wird oft als Losbrechreibung Fbrk bezeichnet. Die Reibung lässt sich durch die folgenden Gleichungen approximieren:
wobei gilt:
F ist die Reibungskraft.
FC ist die Coulomb-Reibung.
Fbrk ist die Losbrechreibung.
vbrk ist die Geschwindigkeit der Losbrechreibung.
vSt ist die Stribeck-Geschwindigkeitsschwelle.
vCoul ist die Coulomb-Geschwindigkeitsschwelle.
vR und vC sind die absoluten Geschwindigkeiten der Anschlüsse R bzw. C.
v ist die Relativgeschwindigkeit.
f ist der viskose Reibungskoeffizient.
Die Exponentialfunktion, die im Stribeck-Teil der Kraftgleichung verwendet wird, ist kontinuierlich und nimmt bei Geschwindigkeiten ab, die größer sind als die Geschwindigkeit der Losbrechreibung.
Die hyperbolische Tangensfunktion, die im Coulomb-Teil der Kraftgleichung verwendet wird, sorgt dafür, dass die Gleichung glatt und kontinuierlich durch v = 0 verläuft, aber bei Geschwindigkeiten ungleich null schnell ihren vollen Wert erreicht.
Die positive Richtung des Blocks verläuft von Anschluss R zu Anschluss C. Wenn die Geschwindigkeit des Anschlusses R größer ist als die des Anschlusses C, überträgt der Block die Kraft folglich von R auf C.
Variablen
Die Priorität und die anfänglichen Zielwerte der Blockvariablen können Sie im Abschnitt Initial Targets im Dialogfeld des Blocks oder in Property Inspector vor der Simulation festlegen. Weitere Informationen finden Sie unter Set Priority and Initial Target for Block Variables.
Nominalwerte bieten eine Möglichkeit, die erwartete Größe einer Variablen in einem Modell anzugeben. Die Verwendung einer auf Nominalwerten basierenden Systemskalierung erhöht die Robustheit der Simulation. Nominalwerte können aus verschiedenen Quellen stammen. Eine davon ist der Abschnitt Nominal Values im Dialogfeld des Blocks oder in Property Inspector. Weitere Informationen finden Sie unter Modify Nominal Values for a Block Variable.
Beispiele
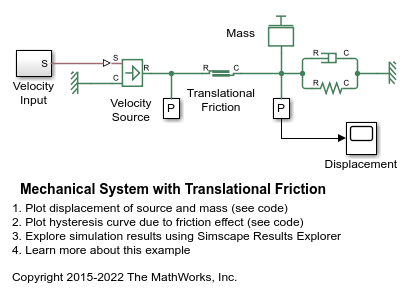
Mechanisches System mit Translationsreibung
Dieses Beispiel zeigt eine Masse, die an einer Feder und einem viskosen Dämpfer angebracht ist. Die Masse wird von einer idealen Geschwindigkeitsquelle über ein Reibungselement angesteuert. Das Bewegungsprofil der Quelle wird so ausgewählt, dass die Darstellung der Verschiebung der Masse gegenüber der von der Quelle bereitgestellten Verschiebung eine typische Hysteresekurve ergibt.
Ports
Erhaltung
Parameter
Die Losbrechkraft, die sich aus der Coulomb-Reibung und der Haftreibung zusammensetzt. Sie muss größer oder gleich dem Coulomb friction force-Wert sein.
Die Geschwindigkeit, bei der die Stribeck-Reibung ihren Höhepunkt erreicht. An diesem Punkt entspricht die Summe der Stribeck- und Coulomb-Reibung der Losbrechkraft (Breakaway friction force). Dieser Parameter gibt den Geschwindigkeitsschwellenwert an, der den Kompromiss zwischen Simulationsgenauigkeit und Geschwindigkeit beeinflusst.
![]()
Die Coulombsche Reibungskraft ist die Reibung, die einer Bewegung bei jeder Geschwindigkeit eine konstante Kraft entgegensetzt.
Proportionalitätskoeffizient zwischen der Reibungskraft und der Relativgeschwindigkeit. Der Parameterwert muss größer oder gleich null sein.
Referenzen
[1] Armstrong, B. and C.C. de Wit, Friction Modeling and Compensation, The Control Handbook, CRC Press, 1995.
Erweiterte Fähigkeiten
Versionsverlauf
Eingeführt in R2007a
Siehe auch
Translational Damper | Translational Hard Stop | Translational Spring