edr
Edit distance on real signals
Syntax
Description
dist = edr(x,y,tol)x and y. edr returns
the minimum number of elements that must be removed from x, y,
or both x and y, so that
the sum of Euclidean distances between the remaining signal elements
lies within the specified tolerance, tol.
[___] = edr(___, specifies
the distance metric to use in addition to any of the input arguments
in previous syntaxes. metric)metric can be one of 'euclidean', 'absolute', 'squared',
or 'symmkl'.
edr(___) without output arguments
plots the original and aligned signals.
If the signals are real vectors, the function displays the two original signals on a subplot and the aligned signals in a subplot below the first one.
If the signals are complex vectors, the function displays the original and aligned signals in three-dimensional plots.
If the signals are real matrices, the function uses
imagescto display the original and aligned signals.If the signals are complex matrices, the function plots their real and imaginary parts in the top and bottom half of each image.
Examples
Generate two real signals: a chirp and a sinusoid. Add a clearly outlying section to each signal.
x = cos(2*pi*(3*(1:1000)/1000).^2); y = cos(2*pi*9*(1:399)/400); x(400:410) = 7; y(100:115) = 7;
Warp the signals so that the edit distance between them is smallest. Specify a tolerance of 0.1. Plot the aligned signals, both before and after the warping, and output the distance between them.
tol = 0.1; edr(x,y,tol)
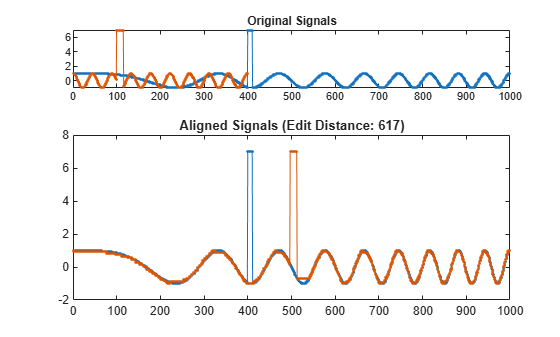
ans = 617
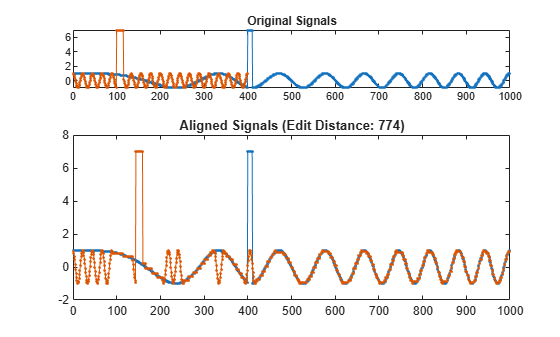
Change the sinusoid frequency to twice its initial value. Repeat the computation.
y = cos(2*pi*18*(1:399)/400); y(100:115) = 7; edr(x,y,tol);
Add an imaginary part to each signal. Restore the initial sinusoid frequency. Align the signals by minimizing the sum of squared Euclidean distances.
x = exp(2i*pi*(3*(1:1000)/1000).^2);
y = exp(2i*pi*9*(1:399)/400);
x(400:405) = 5+3j;
x(405:410) = 7;
y(100:107) = 3j;
y(108:115) = 7-3j;
edr(x,y,tol,'squared');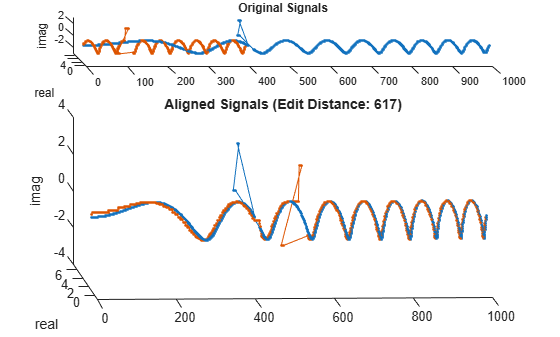
Generate two signals consisting of two distinct peaks separated by valleys of different lengths. Plot the signals.
x1 = [0 1 0 1 0]*.95; x2 = [0 1 0 0 0 0 0 0 1 0]*.95; subplot(2,1,1) plot(x1) xlim([0 12]) subplot(2,1,2) plot(x2) xlim([0 12])
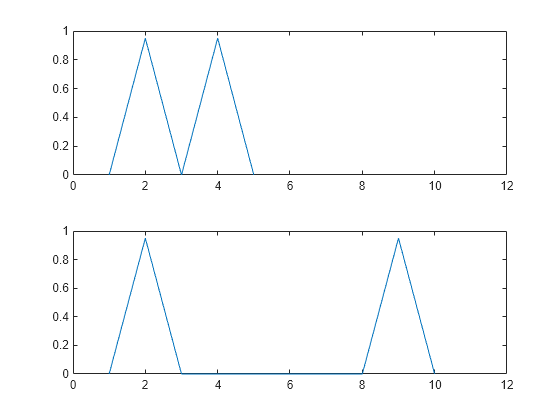
Compute the edit distance between the signals. Set a small tolerance so that the only matches are between equal samples.
tol = 0.1; figure edr(x1,x2,tol);
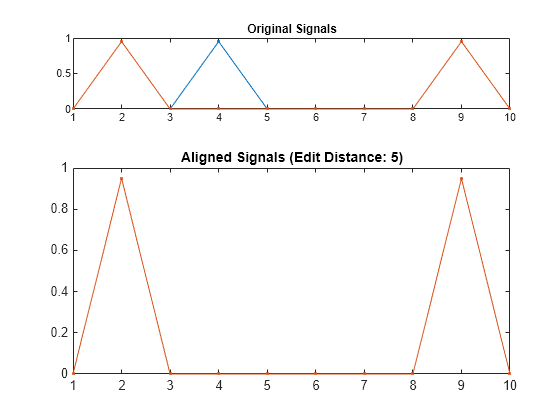
The distance between the signals is 7. To align them, it is necessary to remove the seven central zeros of x2 or add seven zeros to x1.
Compute the D matrix, whose bottom-right element corresponds to the edit distance. For the definition of D, see Edit Distance on Real Signals.
cnd = (abs(x1'-x2))>tol; D = zeros(length(x1)+1,length(x2)+1); D(1,2:end) = 1:length(x2); D(2:end,1) = 1:length(x1); for h = 2:length(x1)+1 for k = 2:length(x2)+1 D(h,k) = min([D(h-1,k)+1 ... D(h,k-1)+1 ... D(h-1,k-1)+cnd(h-1,k-1)]); end end D
D = 6×11
0 1 2 3 4 5 6 7 8 9 10
1 0 1 2 3 4 5 6 7 8 9
2 1 0 1 2 3 4 5 6 7 8
3 2 1 0 1 2 3 4 5 6 7
4 3 2 1 1 2 3 4 5 5 6
5 4 3 2 1 1 2 3 4 5 5
Compute and display the warping path that aligns the signals.
[d,i1,i2] = edr(x1,x2,tol); E = zeros(length(x1),length(x2)); for k = 1:length(i1) E(i1(k),i2(k)) = NaN; end E
E = 5×10
NaN 0 0 0 0 0 0 0 0 0
0 NaN 0 0 0 0 0 0 0 0
0 0 NaN NaN NaN NaN NaN NaN 0 0
0 0 0 0 0 0 0 0 NaN 0
0 0 0 0 0 0 0 0 0 NaN
Repeat the computation, but now constrain the warping path to deviate at most two elements from the diagonal. Plot the stretched signals and the warping path. In the second plot, set the matrix columns to run along the x-axis.
[dc,i1c,i2c] = edr(x1,x2,tol,2); subplot(2,1,1) plot([x1(i1c);x2(i2c)]','.-') title(['Distance: ' num2str(dc)]) subplot(2,1,2) plot(i2c,i1c,'o-',[i2(1) i2(end)],[i1(1) i1(end)]) axis ij title('Warping Path')
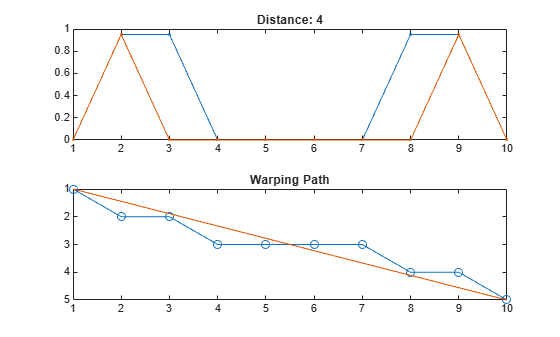
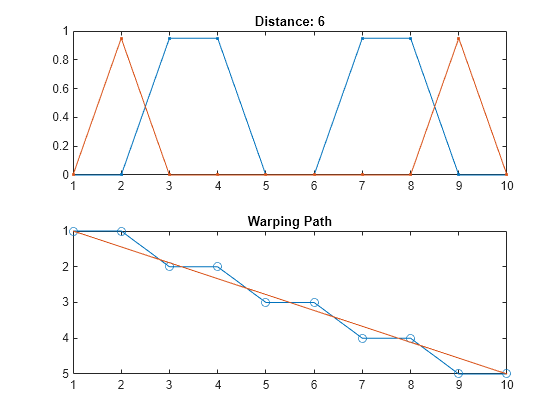
The constraint results in a smaller edit distance but distorts the signals. If the constraint cannot be met, then edr returns NaN for the distance. See this by forcing the warping path to deviate at most one element from the diagonal.
[dc,i1c,i2c] = edr(x1,x2,tol,1); subplot(2,1,1) plot([x1(i1c);x2(i2c)]','.-') title(['Distance: ' num2str(dc)]) subplot(2,1,2) plot(i2c,i1c,'o-',[i2(1) i2(end)],[i1(1) i1(end)]) axis ij title('Warping Path')
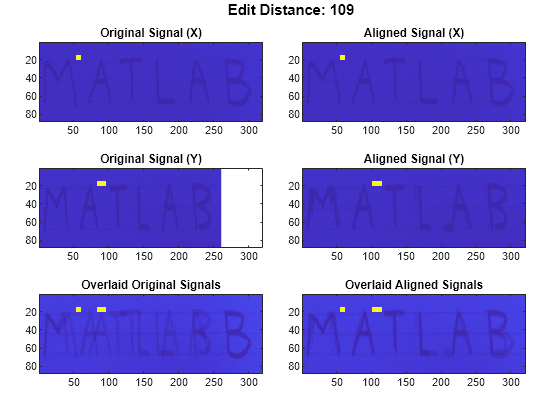
The files MATLAB1.gif and MATLAB2.gif contain two handwritten samples of the word "MATLAB®." Load the files. Add outliers by blotching the data.
samp1 = 'MATLAB1.gif'; samp2 = 'MATLAB2.gif'; x = double(imread(samp1)); y = double(imread(samp2)); x(15:20,54:60) = 4000; y(15:20,84:96) = 4000;
Align the handwriting samples along the x-axis using the edit distance. Specify a tolerance of 450.
edr(x,y,450);
Input Arguments
Output Arguments
More About
References
[1] Chen, Lei, M. Tamer Özsu, and Vincent Oria. "Robust and Fast Similarity Search for Moving Object Trajectories." Proceedings of 24th ACM International Conference on Management of Data (SIGMOD ‘05). 2005, pp. 491–502.
[2] Paliwal, K. K., Anant Agarwal, and Sarvajit S. Sinha. "A Modification over Sakoe and Chiba’s Dynamic Time Warping Algorithm for Isolated Word Recognition." Signal Processing. Vol. 4, 1982, pp. 329–333.
[3] Sakoe, Hiroaki, and Seibi Chiba. "Dynamic Programming Algorithm Optimization for Spoken Word Recognition." IEEE® Transactions on Acoustics, Speech, and Signal Processing. Vol. ASSP-26, No. 1, 1978, pp. 43–49.
Extended Capabilities
Version History
Introduced in R2016b
See Also
alignsignals | dtw | finddelay | findsignal | xcorr