Unicycle Kinematic Model
Compute vehicle motion using unicycle kinematic model
Libraries:
Robotics System Toolbox /
Mobile Robot Algorithms
Description
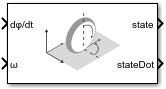
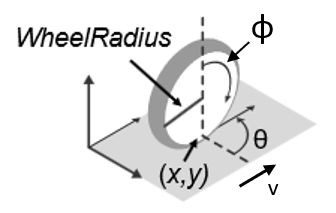
The Unicycle Kinematic Model block creates a unicycle vehicle model to
simulate simplified car-like vehicle dynamics. This model approximates a vehicle as a unicycle
with a given wheel radius, Wheel radius,
that can spin in place according to a steering angular velocity, ω.
Examples

Plan Path for a Unicycle Robot in Simulink
Plan an obstacle-free path for a unicycle robot in Simulink® with probabilistic roadmap (PRM) planning and Pure Pursuit control.
Ports
Input
Output
Parameters
References
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control 1st ed. Cambridge, MA: Cambridge University Press, 2017.
Extended Capabilities
Version History
Introduced in R2019b