unicycleKinematics
Unicycle vehicle model
Description
unicycleKinematics creates a unicycle vehicle model to simulate simplified
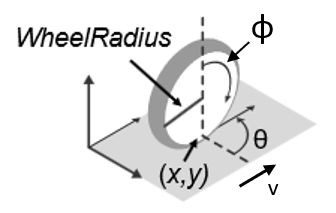
car-like vehicle dynamics. The state of the vehicle is defined as a three-element vector,
[x y theta], with a global xy-position, specified in
meters, and a vehicle heading angle, theta, specified in radians. This
model approximates a unicycle vehicle with a given wheel radius, WheelRadius, that can spin in place according to a heading angle,
theta. To compute the time derivative states for the model, use the
derivative
function with input commands and the current robot state.
Creation
Description
kinematicModel = unicycleKinematics
kinematicModel = unicycleKinematics(Name,Value)
Properties
Object Functions
derivative | Time derivative of vehicle state |
Examples
Create a Robot
Define a robot and set the initial starting position and orientation.
kinematicModel = unicycleKinematics; initialState = [0 0 0];
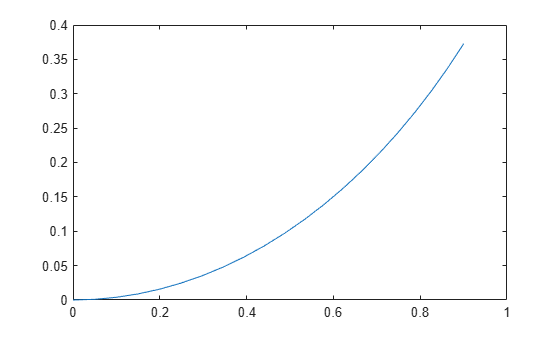
Simulate Robot Motion
Set the timespan of the simulation to 1 s with 0.05 s time steps and the input commands to a wheel speed of 10 rad/s and a heading angular velocity of pi/4 rad/s to do a left turn. Simulate the motion of the robot by using the ode45 solver on the derivative function.
tspan = 0:0.05:1;
inputs = [10 pi/4]; %Constant speed and turning left
[t,y] = ode45(@(t,y)derivative(kinematicModel,y,inputs),tspan,initialState);Plot path
figure plot(y(:,1),y(:,2))
References
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control 1st ed. Cambridge, MA: Cambridge University Press, 2017.