phased.RangeAngleScope
View range-angle response
Description
The phased.RangeAngleScope
System object™ creates a scope for displaying a range-angle response map. The map is a 2-D
representation of response intensity as a function of range and angle of arrival. You can
input two types of data – in-phase and quadrature (I/Q) data and response data.
I/Q data – The data consists of fast-time I/Q samples of pulses or sweeps from multiple sensors. The scope computes and displays the response map. To use I/Q data, set the
IQDataInputproperty totrue. In this mode, you can set the properties shown in Properties Applicable to I/Q Data.Response data – The data consists of the range-angle response itself. The scope displays the range-angle response map. You can obtain range-angle response data from the
phased.RangeAngleResponseobject. To use response data, set theIQDataInputproperty tofalse. In this mode, you can set the properties shown in Properties Applicable to Response Data.
To display a range-angle response map using a scope,
Create the
phased.RangeAngleScopeobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
scope = phased.RangeAngleScope
scope = phased.RangeAngleScope(Name = Value)scope with each specified property set to the
specified value. You can specify additional name-value pair arguments in any order as
(Name1 = Value1,...,NameN
= ValueN). For
example,
scope = phased.RangeAngleScope(IQDataInput = true, RangeMethod = "FFT",
SampleRate = 1e6)Properties
Usage
Description
scope(X)X.
This syntax applies when you set the IQDataInput property to
true, the RangeMethod property to
'FFT', and the DechirpInput property to
false. This syntax is most commonly used with FMCW signals.
scope(X,XREF)X. This syntax applies when you set the
IQDataInput property to true, the
RangeMethod property to 'FFT', and the
DechirpInput property to true. This syntax is
most commonly used with FMCW signals. XREF is generally the
transmitted signal.
Input Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
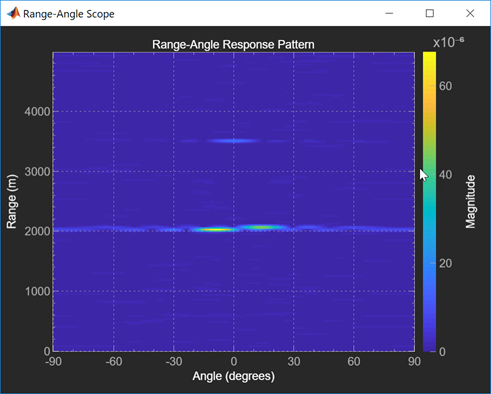
Calculate and visualize the range-angle response from a pulsed radar transmitting a rectangular waveform using a matched filter. One target is approximately 2000 m away and is stationary relative to the radar. The second target is approximately 3500 m away and is also stationary relative to the radar. The third is approximately 2000 m away and is moving away from the radar at approximately 100 m/s. The signals arrive at an 8-element uniform linear array.
Load the data to obtain signals and parameters.
load('RangeAngleResponseExampleData','rectdata'); fs = rectdata.fs; c = rectdata.propspeed; fc = rectdata.fc; rxdata = rectdata.rxdata; mfcoeffs = rectdata.mfcoeffs; noisepower = rectdata.noisepower; array = rectdata.antennaarray;
Create a range-angle scope for processing.
scope = phased.RangeAngleScope( ... 'IQDataInput',true,'RangeMethod','Matched filter', ... 'Name','Range-Angle Scope','ResponseUnits','magnitude', ... 'Position',[560 375 560 420],'RangeUnits','m', ... 'SensorArray',array,'OperatingFrequency',fc, ... 'SampleRate',fs,'PropagationSpeed',c);
Call the scope to display the response map.
scope(rxdata,mfcoeffs)

More About
Version History
Introduced in R2019aSee Also
show | hide | isVisible | phased.RangeDopplerScope | phased.AngleDopplerScope | RangeAngleResponse