phased.DTIScope
Doppler-time intensity scope
Description
The phased.DTIScope
System object™ creates a scrolling display of Doppler response intensity as a function of time.
Each row represents the Doppler response for a pulse or FMCW signal. Sequential calls to the
object add new rows to the bottom of the display window. Columns represent the responses at
specific Doppler values as a function of time. You can input two types of data - in-phase and
quadrature (I/Q) data or response data.
I/Q data – The input consists of fast-time I/Q samples from one or more pulses or FM sweeps. The scope computes the Doppler response and adds it to the display. To use I/Q data, set the
IQDataInputproperty totrue. In this mode, you can set the properties listed in Properties Applicable to I/Q Data.Response data – The data consists of the Doppler response itself as a function of time. The scope only adds the Doppler response to the display. For example, you can obtain Doppler responses from the
phased.RangeDopplerResponseSystem object. To use response data, set theIQDataInputproperty tofalse. In this mode, you can set the properties listed in Properties Applicable to Response Data.
To create and run a Doppler-time intensity scope,
Create the
phased.DTIScopeobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
scope = phased.DTIScopescope. This object displays the Doppler-time response
intensity of the input data.
scope = phased.phased.DTIScope(Name,Value)scope, with each
specified property set to the specified value. You can specify additional name-value pair
arguments in any order as (Name1 =
Value1,...,NameN =
ValueN). For
example,
scope = phased.DTIScope(IQInputData = false, ...
OperatingFrequency = 1e6, ...
SampleRate = 1e6,DopplerOutput = "Speed", ...
DopplerFFTLength = 512);Properties
Usage
Syntax
Description
Input Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
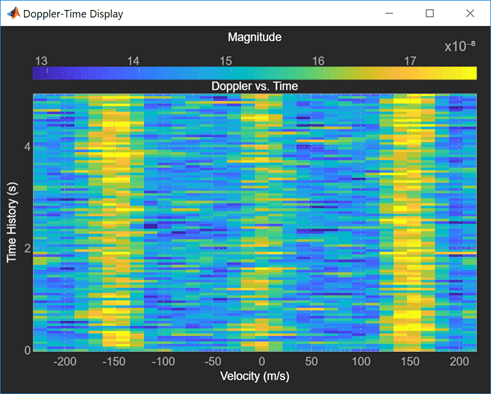
Create a phased.DTIScope object to view a scrolling Doppler-Time Intensity map.
Load the example data.
load('RTIDTIExampleData.mat')
rx_pulses = zeros(numel(fast_time),num_pulse_int);Create the DTI scope.
scope = phased.DTIScope('IQDataInput',false,... 'DopplerOutput','Speed',... 'PropagationSpeed',c,... 'OperatingFrequency',fc,... 'Name','Doppler-Time Display',... 'DopplerResolution',DopplerRes, ... 'DopplerOffset',-prf/2,... 'TimeResolution',0.05,... 'TimeSpan',5,... 'IntensityUnits','magnitude',... 'Position',[560 375 560 420]);
Obtain the pulse repetition interval, 33.3564 microsec.
pri = 1/prf;
Transmit 2000 pulses and coherently process a train of 10 pulses at a time. There are 200 trains. After each pulse, move the target and radar platform. The radar reflects off three targets. The first moves along the x-axis at -150 m/sec. The second moves along the x-axis at +150 m/sec. The third target is stationary. After each pulse train, compute the Doppler response using an FFT.
nsteps = 200; for k = 1:nsteps for m = 1:num_pulse_int [ant_pos,ant_vel] = radarplatform(pri); [tgt_pos,tgt_vel] = targetplatforms(pri); sig = waveform(); [s,tx_status] = transmitter(sig); [~,tgt_ang] = rangeangle(tgt_pos,ant_pos); tsig = radiator(s,tgt_ang); tsig = channels(tsig,ant_pos,tgt_pos,ant_vel,tgt_vel); rsig = targets(tsig); rsig = collector(rsig,tgt_ang); rx_pulses(:,m) = preamplifier(rsig,~(tx_status>0)); end rx_pulses = gain(rx_pulses); dshift = fft(rx_pulses.'); dshift = fftshift(abs(dshift),1); scope(mean(dshift,2)); pause(0.1) radarplatform(.05); targetplatforms(.05); end

