edgeConstraints
Edge constraints in pose graph
Syntax
Description
measurements = edgeConstraints(poseGraph)
[
also returns the information matrices for each edge. The information matrix is the
inverse of the covariance of the pose measurement.measurements,infoMats] = edgeConstraints(poseGraph)
[
returns edge constraints for the specified edge IDs.measurements,infoMats] = edgeConstraints(poseGraph,edgeIDs)
Examples
This example shows how to identify and remove spurious loop closures from pose graph. To do this, you can modify the relative pose of a loop closure edge and try optimizing the pose graph with and without removing the auto spurious loop closure and compare the results.
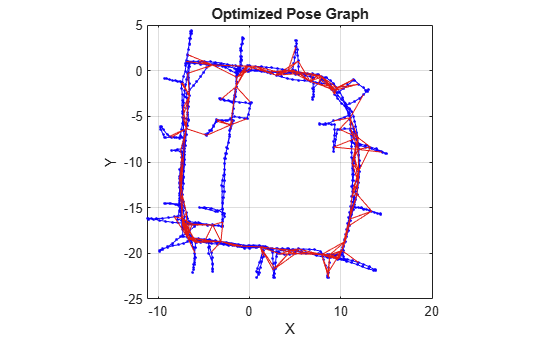
Load the Intel Research Lab Dataset that contains a 2-D pose graph. Optimize the pose graph. Plot the pose graph with IDs off. Red lines indicate loop closures identified in the dataset.
load intel-2d-posegraph.mat pg optimizedPG = optimizePoseGraph(pg); show(optimizedPG,IDs="off"); title("Optimized Pose Graph")
Modify the relative pose of the loop closure edge 1386 to some random values.
loopclosureId = 1386; nodePair = edgeNodePairs(optimizedPG,loopclosureId); [relPose,infoMat] = edgeConstraints(optimizedPG,loopclosureId); relPose(2) = -5; relPose(3) = 1.5; addRelativePose(optimizedPG,relPose,infoMat,nodePair(1),nodePair(2));
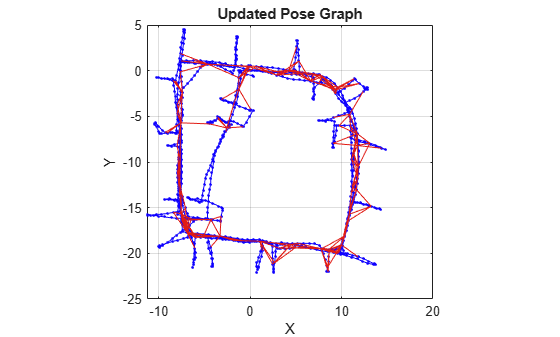
Optimize the pose graph without auto loop closure trimming. Plot the optimized pose graph to see the poor adjustment of the nodes with loop closures.
[updatedPG,solutionInfo] = optimizePoseGraph(optimizedPG); show(updatedPG,IDs="off"); title("Updated Pose Graph")
Certain loop closures should be trimmed from the pose graph. Use the trimLoopClosures function to trim these bad loop closures. Set the truncation threshold and maximum iterations for the trimmer parameters.
trimParams = struct("TruncationThreshold",0.5,"MaxIterations",100);
Generate solver options.
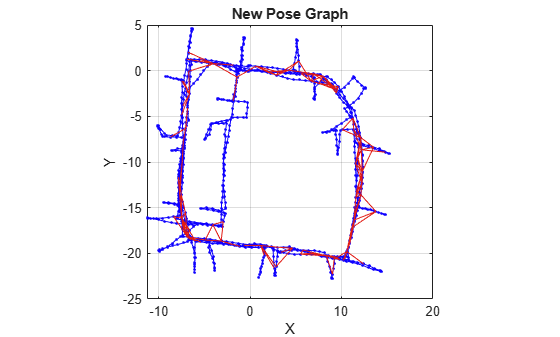
solverOptions = poseGraphSolverOptions("g2o-levenberg-marquardt");Use the trimLoopClosures function with the trimmer parameters and solver options. Plot the new pose graph to see the bad loop closures were removed.
[newPG,trimInfo] = trimLoopClosures(updatedPG,trimParams,solverOptions); show(newPG,IDs="off"); title("New Pose Graph")
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2019b