LTI System
Verwendung zeitinvarianter Systemmodellobjekte in Simulink
Bibliotheken:
Control System Toolbox
Beschreibung
Der Block LTI System importiert lineare Systemmodellobjekte in die Simulink®-Umgebung. Sie legen das zu importierende LTI-Modell im Parameter LTI system variable fest. Sie können jeden Typ echter, linearer, zeitinvarianter dynamischer Systemmodelle importieren. Wenn das importierte System ein Zustandsraummodell (ss) ist, können Sie die Werte für den Anfangszustand im Parameter Initial states angeben.
Beispiele
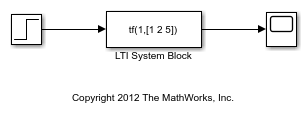
Das LTISystemBlockSimulation-Modell zeigt, wie Sie einen LTI System-Block verwenden, um die Antwort einer SISO-Transferfunktion auf eine Sprungeingabe zu simulieren.
Um ein Modell für den LTI System-Block anzugeben, setzen Sie den Blockparameter LTI system variable auf einen der folgenden Werte:
Den Variablennamen eines LTI-Modells im MATLAB®-Workspace oder Modell-Workspace, wie beispielsweise
sys.Einen MATLAB-Ausdruck, der ein LTI-Modell ausgibt, wie beispielsweise
tf(1,[1 1]).
Beispielsweise können Sie ein Zustandsraummodell (ss), ein Null-Polstellen-Verstärkungsmodell (zpk) oder ein Transferfunktionsmodell (tf) angeben. Sie können SISO- oder MIMO-Modelle sowie zeitkontinuierliche oder zeitdiskrete Modelle simulieren.
Im LTISystemBlockSimulation-Modell ist der Parameter LTI system variable ein MATLAB-Ausdruck tf(1,[1 2 5]), der eine zeitkontinuierliche SISO-Transferfunktion erstellt. Wenn das angegebene System ein Zustandsraummodell (ss) ist, können Sie die Werte für den Anfangszustand im Parameter Initial states angeben.
Simulieren Sie das Modell und untersuchen Sie das Ergebnis im Scope.
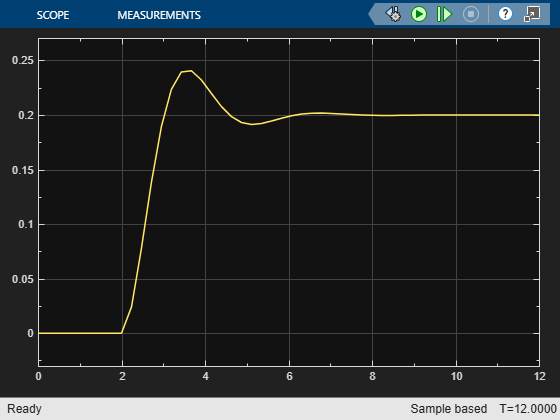
Dieses Beispiel simuliert die Systemantwort auf eine Stufeneingabe bei t = 2 s. Verwenden Sie den LTI System-Block, um ein LTI-Modellobjekt an einer beliebigen Stelle im Simulink-Modell zu importieren, um die Antwort des linearen Systems auf eine beliebige Eingabe zu simulieren.
Dieses Modell zeigt, wie Sie einen LTI System-Block verwenden, um ein lineares MIMO-System in Simulink® darzustellen.
Der LTI System-Block weist einen Eingang und einen Ausgang auf, auch wenn Sie ein MIMO-Modell für den Block angeben. In diesem Fall werden der Block-Eingang und -Ausgang Vektorsignale. Beispielsweise verwendet das Modell LTISystemBlockMIMO einen LTI System-Block, um eine MIMO-Regelstrecke in einem Regelsystem darzustellen.
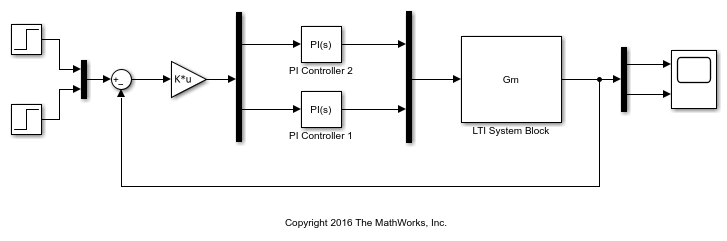
In diesem Modell ist das im Block angegebene LTI-System Gm, ein Transferfunktionsmodell mit 2 Eingängen und 2 Ausgängen, das im Modell-Workspace gespeichert ist. Ein Mux-Block kombiniert die zwei Reglerausgänge in ein Vektorsignal für den LTI System-Blockeingang. Ähnlich hierzu trennt der Demux-Block den Vektorausgang des LTI System-Blocks in zwei skalare Signale.
Simulieren Sie das Modell und untersuchen Sie das Ergebnis im Scope.
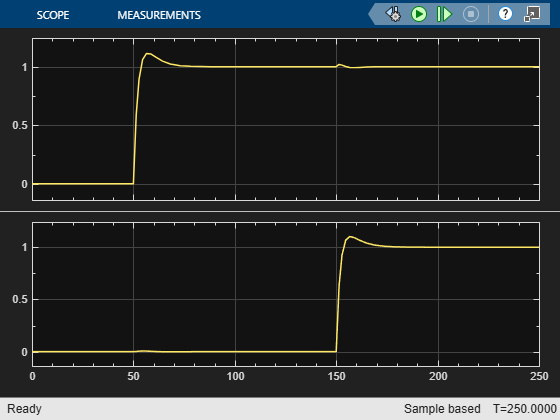
Dieses Beispiel simuliert die Antwort eines geschlossenen Regelkreises auf eine Stufe bei t = 50 s als erste Eingabe und eine Stufe bei t = 150 s als zweite Eingabe. Sie können den LTI System-Block an jeder Stelle nutzen, an der Sie ein LTI-System in ein Simulink-Modell einfügen möchten.