Video Player is loading.
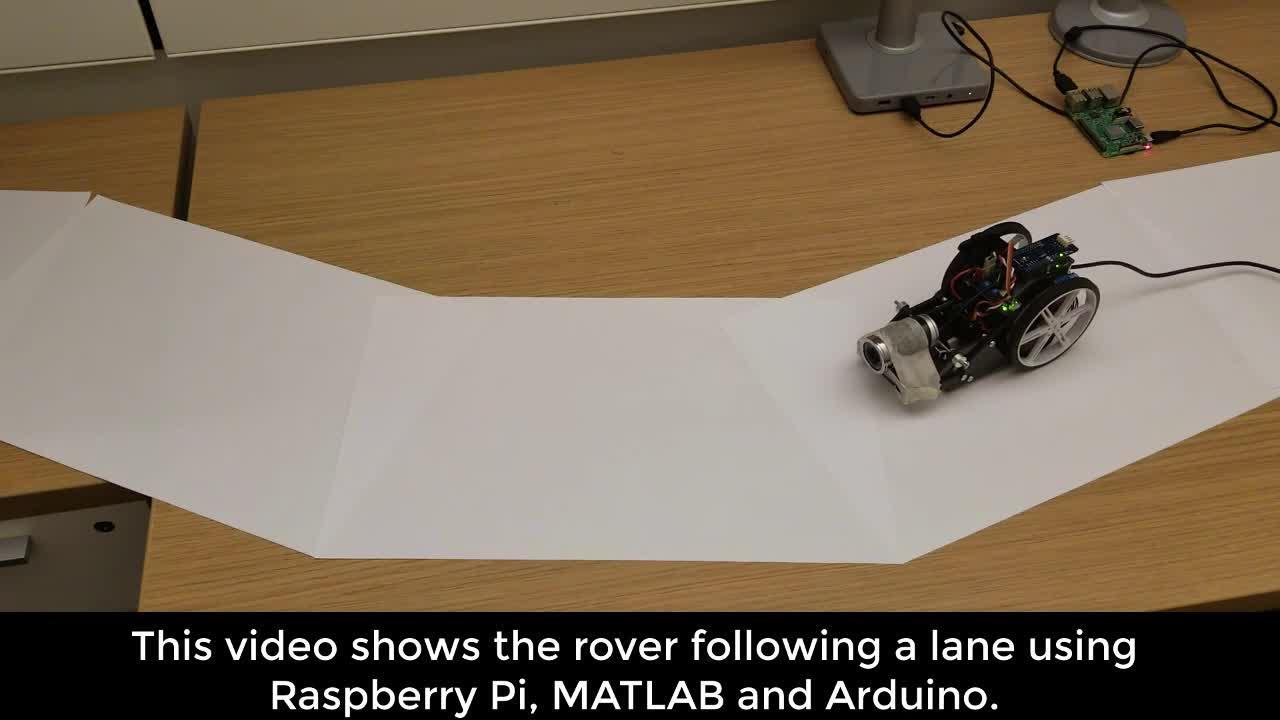
Lane-Following Robot Using MATLAB, Raspberry Pi, and Arduino
In this video, we show how to develop a lane-following vision algorithm using MATLAB® and deploy that to a Raspberry Pi™ using MATLAB function block in Simulink®. This algorithm then sends commands over Wi-Fi to an Arduino® which controls the rover to stay inside a lane. This project extends the Arduino Engineering Kit rover project.
Published: 10 Oct 2019

Featured Product
Computer Vision Toolbox









Website auswählen
Wählen Sie eine Website aus, um übersetzte Inhalte (sofern verfügbar) sowie lokale Veranstaltungen und Angebote anzuzeigen. Auf der Grundlage Ihres Standorts empfehlen wir Ihnen die folgende Auswahl: United States.
Sie können auch eine Website aus der folgenden Liste auswählen:
Amerika
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)