Structure from Motion
3D-Rekonstruktion aus mehreren Ansichten
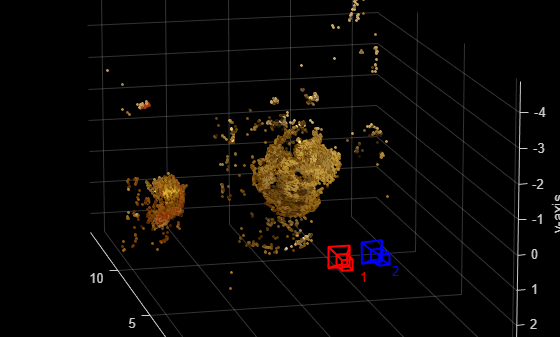
Structure from Motion (SfM, Struktur aus Bewegung) ist ein Prozess zum Schätzen der 3D-Struktur einer Szene aus einer Reihe von 2D-Bildern. Weitere Einzelheiten finden Sie unter Implement Visual SLAM in MATLAB.
Apps
| Camera Calibrator | Estimate geometric parameters of a single camera |
| Stereo Camera Calibrator | Estimate geometric parameters of a stereo camera |
Funktionen
Themen
Grundlagen
- Koordinatensysteme
Angabe von Pixel-Indizes, räumlichen Koordinaten und 3D-Koordinatensystemen - Point Feature Types
Choose functions that return and accept points objects for several types of features. - Local Feature Detection and Extraction
Learn the benefits and applications of local feature detection and extraction. - What Is Structure from Motion?
Estimate three-dimensional structures from two-dimensional image sequences.
Apps für die Kamerakalibrierung
- Using the Single Camera Calibrator App
Prepare camera calibration images and estimate camera intrinsic parameters. - Using the Stereo Camera Calibrator App
Calibrate a stereo camera, which you can then use to recover depth from images.
Enthaltene Beispiele
Structure from Motion from Two Views
Estimate 3-D structure of a scene from a set of 2-D images.

Monocular Visual Odometry
Determine location and orientation of a camera by analyzing a sequence of images.