Koordinatensysteme
Positionen in Bildern können Sie mithilfe verschiedener Koordinatensysteme angeben. Koordinatensysteme werden verwendet, um Elemente in Beziehung zueinander zu setzen. Koordinaten in Pixel- und räumlichen Koordinatensystemen beziehen sich auf Positionen in einem Bild. Koordinaten in 3D-Koordinatensystemen beschreiben die 3D-Positionierung und den Ursprung des Systems.
Pixel-Indizes
Mit Pixel-Koordinaten können Sie Positionen in Bildern angeben. Im Pixel-Koordinatensystem wird das Bild als Raster aus diskreten Elementen behandelt, die von oben nach unten und von links nach rechts geordnet sind.
![]()
Bei Pixel-Koordinaten werden die Zeilen r abwärts und die Spalten c nach rechts gezählt. Pixel-Koordinaten sind ganzzahlige Werte im Bereich von 1 bis zur Länge der Zeile bzw. Spalte. Die in der Computer Vision Toolbox™-Software verwendeten Pixel-Koordinaten beginnen immer bei eins, was mit den Pixel-Koordinaten, die durch die Image Processing Toolbox™ und MATLAB® verwendet werden, übereinstimmt. Weitere Informationen zum Pixel-Koordinatensystem finden Sie unter Pixel Indices.
Räumliche Koordinaten
Mit räumlichen Koordinaten können Sie eine Position in einem Bild mit größerer Genauigkeit angeben als mit Pixel-Koordinaten. Im Pixel-Koordinatensystem wird ein Pixel als diskrete Einheit behandelt, die durch ein Paar ganzer Zahlen für Zeile und Spalte, wie zum Beispiel (3,4), eindeutig identifiziert werden kann. Im räumlichen Koordinatensystem werden Positionen in einem Bild in Form von Pixelteilen dargestellt, wie zum Beispiel (3.3, 4.7).

Weitere Informationen zum räumlichen Koordinatensystem finden Sie unter Spatial Coordinates.
3D-Koordinatensysteme
Wenn Sie eine 3D-Szene rekonstruieren, können Sie die generierten 3D-Punkte in einem von zwei Koordinatensystemen definieren. In einem kamerabasierten Koordinatensystem werden die Punkte relativ zum Mittelpunkt der Kamera definiert. In einem kalibrierungsmusterbasierten Koordinatensystem werden die Punkte relativ zu einem Punkt in der Szene definiert.
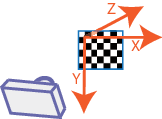
Die Funktionen der Computer Vision Toolbox verwenden das Rechtskoordinatensystem. In diesem System zeigt die x-Achse nach rechts, die y-Achse nach unten und die z-Achse von der Kamera weg. Um 3D-Punkte anzuzeigen, verwenden Sie pcshow.
Kamerabasiertes Koordinatensystem
Die in einem kamerabasierten Koordinatensystem dargestellten Punkte werden mit dem Ursprung, der sich am optischen Mittelpunkt der Kamera befindet, beschrieben.

In einem Stereosystem befindet sich der Ursprung am optischen Mittelpunkt von Kamera 1.

Wenn Sie mit einer kalibrierten Kamera eine 3D-Szene rekonstruieren, geben die Funktionen reconstructScene und triangulate 3D-Punkte zurück, wobei sich der Ursprung am optischen Mittelpunkt von Kamera 1 befindet. Wenn Sie Kinect®-Bilder verwenden, gibt die Funktion pcfromkinect 3D-Punkte zurück, wobei sich der Ursprung am Mittelpunkt der RGB-Kamera befindet.
Kalibrierungsmusterbasiertes Koordinatensystem
Die in einem kalibrierungsmusterbasierten Koordinatensystem dargestellten Punkte werden mit dem Ursprung, der sich an Position (0,0) des Kalibrierungsmusters befindet, beschrieben.
Wenn Sie aus mehreren Ansichten, die ein Kalibrierungsmuster enthalten, eine 3D-Szene rekonstruieren, werden die generierten 3D-Punkte im kalibrierungsmusterbasierten Koordinatensystem definiert. Das Beispiel Structure from Motion from Two Views zeigt, wie Sie aus einem Paar aus 2D-Bildern, die ein Schachbrettmuster enthalten, eine 3D-Szene rekonstruieren.