segmentObjects
Syntax
Description
[___] = segmentObjects(___,
configures the segmentation using additional name-value arguments. For example,
Name=Value)segmentObjects(detector,I,Threshold=0.9) specifies the detection
threshold as 0.9.
Note
This function requires the Computer Vision Toolbox™ Model for Mask R-CNN Instance Segmentation. You can install the Computer Vision Toolbox Model for Mask R-CNN Instance Segmentation from Add-On Explorer. For more information about installing add-ons, see Get and Manage Add-Ons. To run this function, you will require the Deep Learning Toolbox™.
Examples
Load a pretrained Mask R-CNN object detector.
detector = maskrcnn("resnet50-coco")detector =
maskrcnn with properties:
ModelName: 'maskrcnn'
ClassNames: {1×80 cell}
InputSize: [800 1200 3]
AnchorBoxes: [15×2 double]
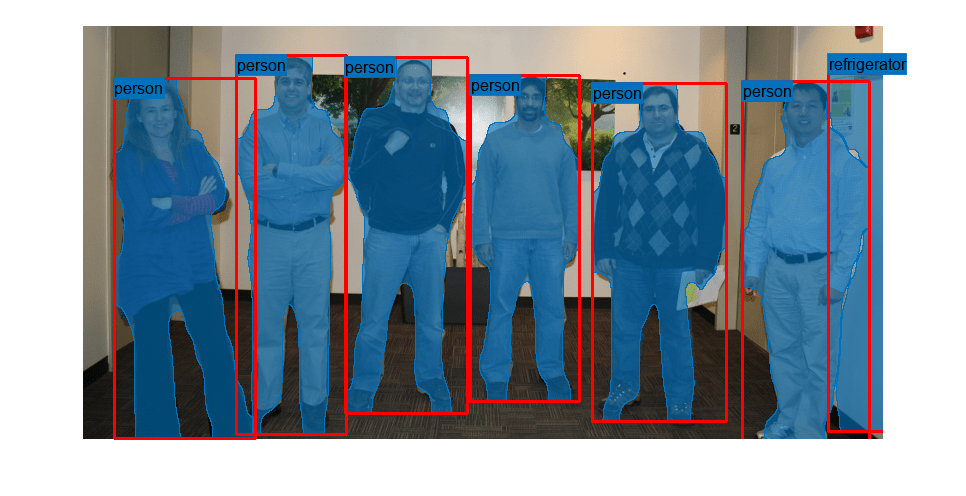
Read a test image that includes objects that the network can detect, such as people.
I = imread("visionteam.jpg");Segment instances of objects using the Mask R-CNN object detector.
[masks,labels,scores,boxes] = segmentObjects(detector,I,Threshold=0.95);
Overlay the detected object masks in blue on the test image. Display the bounding boxes in red and the object labels.
overlayedImage = insertObjectMask(I,masks);
imshow(overlayedImage)
showShape("rectangle",boxes,Label=labels,LineColor=[1 0 0])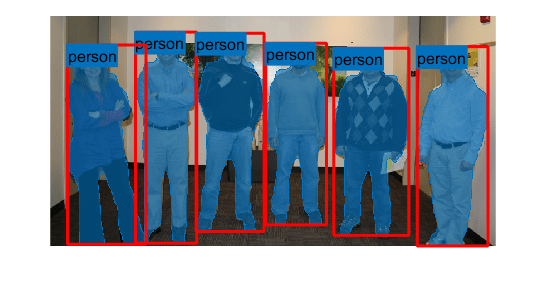
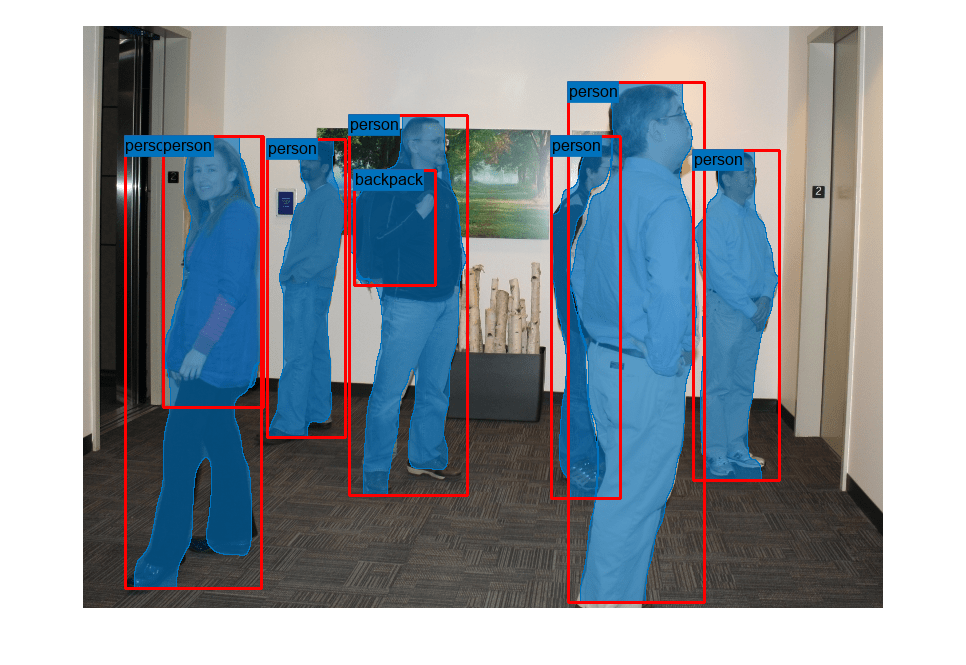
Load a pretrained Mask R-CNN object detector.
detector = maskrcnn("resnet50-coco");Create a datastore of test images.
imageFiles = fullfile(toolboxdir("vision"),"visiondata","visionteam*.jpg"); dsTest = imageDatastore(imageFiles);
Segment instances of objects using the Mask R-CNN object detector.
dsResults = segmentObjects(detector,dsTest);
Running Mask R-CNN network -------------------------- * Processed 2 images.
For each test image, display the instance segmentation results. Overlay the detected object masks in blue on the test image. Display the bounding boxes in red and the object labels.
while(hasdata(dsResults)) testImage = read(dsTest); results = read(dsResults); overlayedImage = insertObjectMask(testImage,results{1}); figure imshow(overlayedImage) showShape("rectangle",results{4},Label=results{2},LineColor=[1 0 0]) end