Punktwolkenverarbeitung
Eine Punktwolke ist ein Satz an Datenpunkten in einem 3D-Raum. Die gesammelten Punkte stellen eine 3D-Form oder ein 3D-Objekt dar. Jeder Punkt im Datensatz wird von einer geometrischen Koordinate x, y und z dargestellt. Mit Punktwolken kann eine große Anzahl einzelner räumlicher Messungen in einen Datensatz zusammengefasst werden, der als beschreibbares Objekt dargestellt werden kann. Die Punktwolkenverarbeitung wird bei der Roboter-Navigation und -Wahrnehmung, Tiefenschätzung, Stereo-Vision, visueller Registrierung und ADAS (Advanced Driver Assistance Systems) verwendet. Computer Vision Toolbox™-Algorithmen bieten eine Punktwolken-Verarbeitungsfunktion zum Downsampling, Entrauschen und zur Transformation von Punktwolken. Die Toolbox umfasst zudem Punktwolken-Registrierung, Anpassung geometrischer Formen an 3D-Punktwolken und die Möglichkeit zum Lesen, Schreiben, Speichern, Anzeigen und Vergleichen von Punktwolken. Sie können mehrere Punktwolken kombinieren, um eine 3D-Szene zu rekonstruieren oder eine Karte mit registrierten Punktwolken zu erstellen, Schleifenschlüsse zu erkennen, die Karte zu optimieren, um Abweichungen auszugleichen und Lokalisierung in der vorgefertigten Karte durchzuführen. Weitere Einzelheiten finden Sie unter Implement Point Cloud SLAM in MATLAB.
Um eine Punktwolken-Registrierung durchzuführen, bei der zwei oder mehr Punktwolken an einem einzigen Koordinatensystem ausgerichtet werden, beginnen Sie üblicherweise mit einer Punktwolke als Referenz oder festen Punktwolke und richten daraufhin weitere bewegliche Punktwolken an ihr aus. Die absolute Pose einer Punktwolke bezieht sich auf ihre globale Position und Ausrichtung hinsichtlich einem Referenzrahmen, der oft als Weltkoordinaten-Rahmen bezeichnet wird. Computer Vision Toolbox umfasst diverse Registrierungstechniken zur Registrierung einer beweglichen Punktwolke an einer festen Punktwolke. Diese Techniken umfassen ICP (Iterative Closest Point), NDT (Normal Distributions Transform), Phasenkorrelation und CPD (Coherent Point Drift). Sie können zudem die Lidar Registration Analyzer (Lidar Toolbox) App verwenden, um eine interaktive Registrierung durchzuführen und die Ergebnisse verschiedener Registrierungstechniken, Abstimmungsparameter und Vorverarbeitungschritte miteinander zu vergleichen.
Funktionen
Blöcke
Themen
- Choose a Point Cloud Viewer
Compare visualization functions.
- Choose SLAM Workflow Based on Sensor Data
Choose the right simultaneous localization and mapping (SLAM) workflow and find topics, examples, and supported features.
- Implement Point Cloud SLAM in MATLAB
Understand point cloud registration and mapping workflow.
- The PLY Format
The Stanford Triangle Format.
- Getting Started with Point Clouds Using Deep Learning
Understand how to use point clouds for deep learning.
- Choose Function to Visualize Detected Objects
Compare visualization functions.
- Labeling, Segmentation, and Detection (Lidar Toolbox)
Label, segment, detect, and classify objects in point cloud data using deep learning and geometric algorithms
Enthaltene Beispiele

Build a Map from Lidar Data Using SLAM
Process lidar data to build a map and estimate a vehicle trajectory using simultaneous localization and mapping.

Build a Map from Lidar Data Using SLAM on GPU
Perform 3-D simultaneous localization and mapping (SLAM) on an NVIDIA® GPU.

Build a Map from Lidar Data
Process 3-D lidar sensor data to progressively build a map, with assistance from inertial measurement unit (IMU) readings.
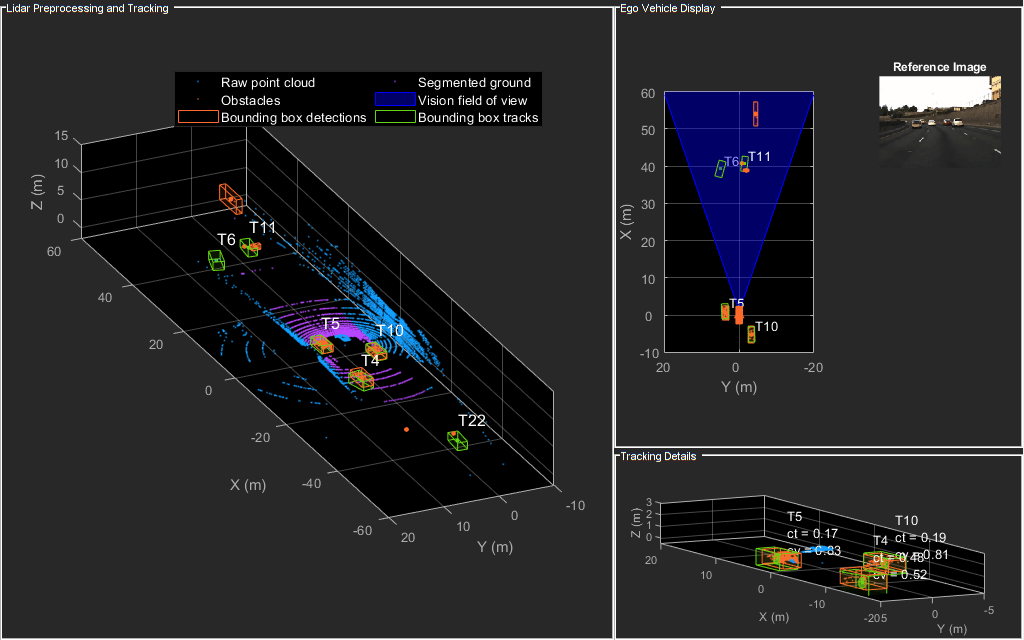
Detect and Track Vehicles Using Lidar Data
Track vehicles using measurements from a lidar sensor mounted on top of an ego vehicle.

Train Classification Network to Classify Object in 3-D Point Cloud
Train a classification network to classify objects in a 3-D point cloud.

3-D Point Cloud Registration and Stitching
Combine multiple point clouds to reconstruct a 3-D scene using Iterative Closest Point (ICP) algorithm. It then shows how to leverage color information available in the point clouds to improve the accuracy of the scene.

Design Lidar SLAM Algorithm Using Unreal Engine Simulation Environment
Record synthetic sensor data from a 3-D simulation environment, and develop a simultaneous localization and mapping (SLAM) algorithm using the recorded data.

Ground Plane and Obstacle Detection Using Lidar
Process 3-D lidar data from a sensor mounted on a vehicle by segmenting the ground plane and finding nearby obstacles.